|
 |
 |
|
 |
|
|
|
|
|
|
For example is not proof but it does show that something is possible.
Definition. Let G be a group. A subgroup is a subset of a group which is also a group of its own, that is, that follows all axioms that are required to form a group. Formally, H ⊂ G (H is a subset of G), ∀a, b ∈ H, a·b ∈ H, and (H, ·) is a group (closure, identity, and inverses).
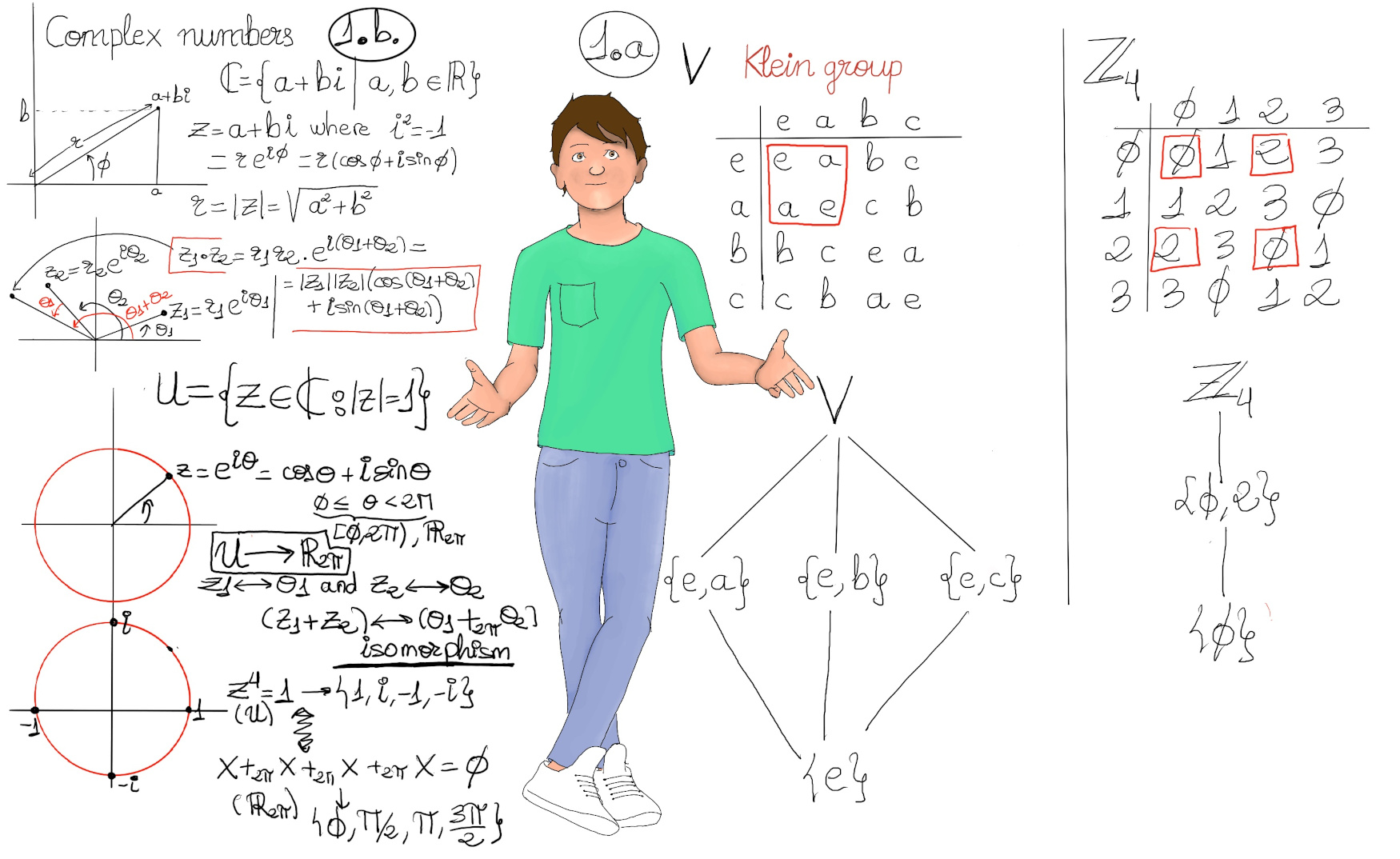
We use the notation H ≤ G to mean that H is a subgroup of G. Every group G has at least two trivial subgroups: the group G itself and the subgroup {e} containing only the identity element. Notice that {e}, a set, is different than e, the identity element.
All other subgroups are said to be nontrivial or proper subgroups, and we express it as H < G.
Let r be the counterclockwise rotation by θ = $\frac{2π}{n}$, then the n rotations in Dn are e, r, r2, ···, rn-1, namely e2π/n, e2(2π/n), ···, e(n-1)2π/n. If {a1, a2, ···, an} denotes the vertices of a n-gon, the cyclic permutation α = (a1, a2, ···, an) ∈ Sn is the rotation r. Chose any vertex, e.g. a1, and consider it the fixed point of a reflection of the plane, i.e., the permutation β = (a2, an)(a3, an-1)··· ∈ Sn. Since Dn is generated by α and β ∈ Sn ⇒ Dn ≤ Sn
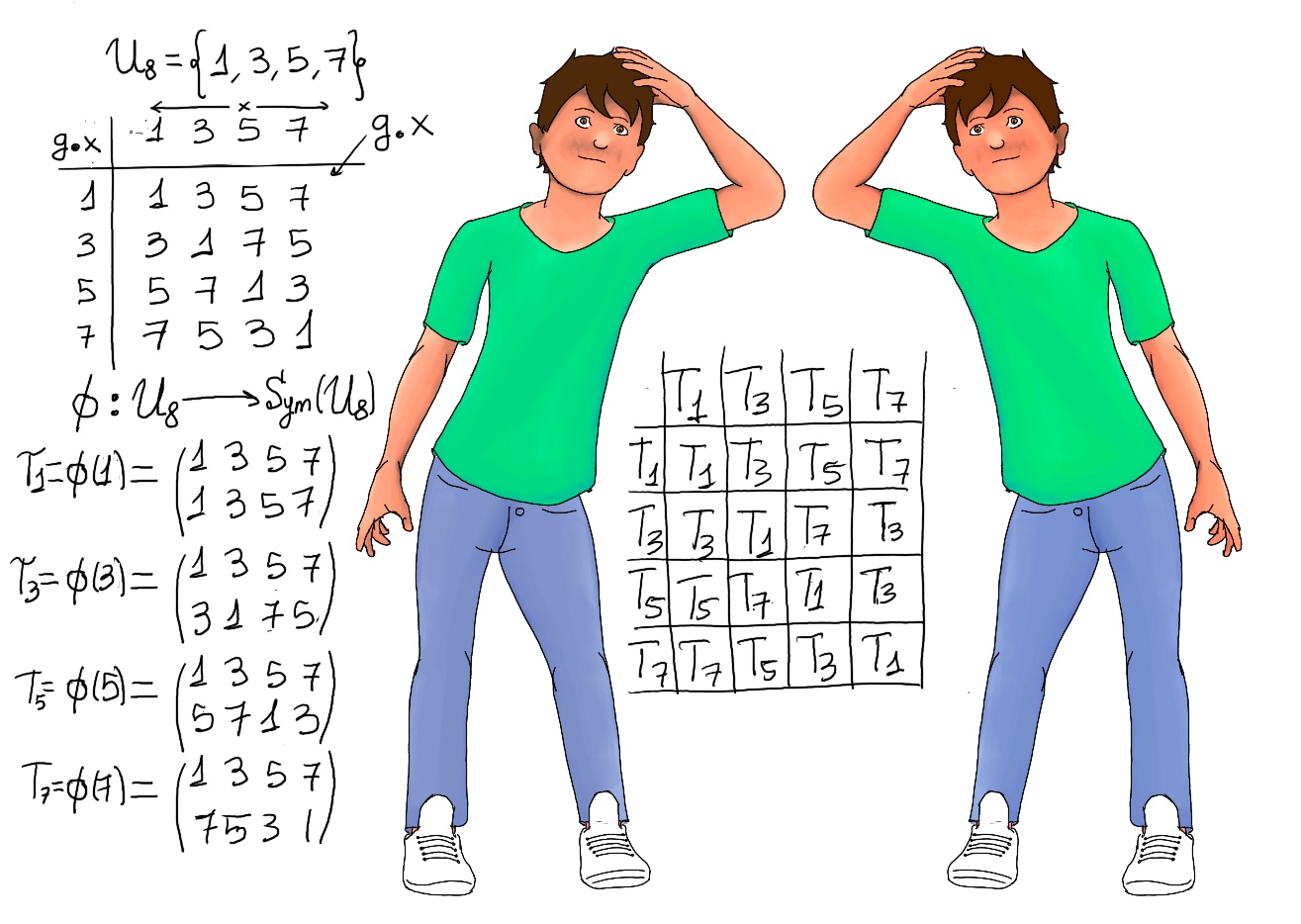
Using matrix multiplication, we have Q8 = {±1, ±i, ±j, ±k} and i2 = j2 = k2 =−1, ij = −ji = k, jk = −kj = i, ki = −ik = j. Moreover, 1 is the identity of Q8, it is closed under matrix multiplication, and contains the inverse of every element, so it is a subgroup of GL(2, ℂ).
Two-Step Subgroup Test. Let G be a group, a non empty subset H ⊂ G is a subgroup (H ≤ G) iff (it is short for if and only if)
Proof:
If H is a subgroup, then (i) and (ii) obviously hold.
Conversely, suppose (i) and (ii). The associative o grouping property is inherited from the group product of G.
∀a ∈ H, a-1 ∈ H (ii) ⇒ a(a-1) = (a-1a) = e ∈ H (i) ⇒ e is a neutral element of G, so it is a neutral element of H ⇒ H has a neutral element and every element in H (∀a ∈ H) has an inverse element.
Examples.
Proof. If z, w ∈ $\Tau$, z = cosθ + i sinθ = eiθ, w = cosΦ + isinΦ = eiΦ. zw = eiθeiΦ = ei(θ + Φ) = cos(θ + Φ) + i sin(θ + Φ), zw ∈ $\Tau$ so it is closed.
This is basic stuff, z, w ∈ ℂ, z = r(cosθ + i sinθ), w = s(cosΦ + isinΦ), then zw = rs(cos(θ + Φ) + i sin(θ + Φ)).
If z ∈ $\Tau$, z = a + ib, r = |z| = $\sqrt{a^{2}+b^{2}} = 1$, z-1 = $\frac{a-bi}{a^{2}+b^{2}} = a - bi,$ and r’ = |z-1| = $\sqrt{a^{2}+(-b)^{2}} = 1$ ⇒ z-1 ∈ $\Tau$.
Theorem. One-Step Subgroup Test. Let G be a group, a non empty arbitrary subset of G, H ⊆ G, is a subgroup of G (H ≤ G) iff ∀a, b ∈ H, a·b-1 ∈ H.
Proof. If H ≤ G, ∀a, b ∈ H ⇒ [H subgroup ⇒ inverses] b-1∈ H ⇒[Closed operation] a·b-1 ∈ H.
Conversely, suppose a non empty arbitrary subset of G, say H ⊆ G, and ∀a, b ∈ H, a·b-1 ∈ H. In particular, take a = b ⇒ b·b-1 = b-1·b = e ∈ H ⇒ e is a neutral element of G, so it is a neutral element of H ⇒ H has G’neutral element e and any arbitrary element in H, say b ∈ H, has an inverse element, b-1∈ G ⇒ [e, b ∈ H] e·b-1 = b-1 ∈ H.
Closed operation. ∀a, b ∈ H, let’s show that their product is also in H. We know that b-1 ∈ H ⇒ (b-1)-1 ∈ H ⇒ a·(b-1)-1 = ab ∈ H ∎
Theorem. Finite Subgroup Test. Let G be a group,a non empty finite subset of G is a subgroup if and only if it is closed under the operation of G,i.e., H ⊆ G, |H| = n, such that ∀a, b ∈ H, a·b ∈ H ⇒ H ≤ G.
Proof. Using the Two-Set Subgroup Test, we only need to prove that a-1 ∈ H, ∀a ∈ H.
If a = e ⇒ [By assumption, H is closed under the operation of G] ee = e ∈ H and a-1 = e ∈ H.
If a ≠ e ⇒ a, a2, a3,… belong to H because H is closed under the operation of G (∀a, b ∈ H, a·b ∈ H, so a·a = a2 ∈ H and so on). However, since H is finite, this process will necessary produce repetitions ⇒∃i, j: ai = aj and i > j ⇒ ai-j = e ∈ H ⇒ [∃i, j such that i-j > 0, ai-j∈ H] Therefore, a-1 = ai-j-1 ∈ H because 0 ≤ i-j-1 < i-j and a · ai-j-1 = ai-j-1 · a = ai-j = e∎
Proposition. Subgroup relation is transitive. If K is a subgroup of G, and H is a subgroup of K, then H is a subgroup of G, H ≤ K ≤ G ⇒ H ≤ G.
Proof.
H ≤ K ≤ G ⇒ H ⊆ K ⊆ G ⇒ H is a subset of G, H ⊆ G. The closure of H under G’s operation is not changed, whether you are looking at H as a subset of K or G under the same group operation.
Futhermore, since the identity element in G, say eG, is unique ⇒ eG = eK = eH. Similarity, ∀a ∈ H, a-1 ∈ H (H ≤ K), and this inverse is also unique (Uniqueness of identity and inverses.) ∎
Proposition. Intersection of two subgroups of a group is again a subgroup. If H ≤ G, L ≤ G, then H∩L ≤ G.
Proof: ∀a, b ∈ H∩L, a, b ∈ H and a, b ∈ L ⇒ [H ≤ G, L ≤ G, and One-Step Test] a·b-1 ∈ H and a·b-1 ∈ L ⇒ a·b-1 ∈ H∩L∎
Examples. Let G be a group and a be any element in G (a ∈ G). Then, a generating set of a group is a subset of the group such that every element of the group can be expressed as a combination (under the group operation) of finitely many elements of the subset and their inverses. In particular, the set ⟨a⟩={an | n ∈ Z} is the cyclic subgroup generated by a.
Proof: a0 = e ∈ ⟨a⟩. g, h ∈ ⟨a⟩, g = am, h = an for some m, n ∈ ℤ, gh = am+n ∈ ⟨a⟩, m+n ∈ ℤ; g-1 = a-m ∈ ⟨a⟩ (ama-m = a0 = e, -m ∈ ℤ)∎
Examples:

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.