|
 |
 |
|
 |
|
|
|
|
|
|
Do you still remember that I am still only fourteen?” I said, starting to lose my temper and grasping how Mum should feel like when Dad says things like, “Such a sophisticated perfume honey, how many litres and for how long did you need to soak in it? Come to my localhost, I will turn off my firewall, disable my antivirus, grant you sudo access, and show you my source code,” Apocalypse, Anawim, #justothepoint
A polygon is a two-dimensional or plane figure that has a finite number of sides. It is described by a finite number of straight line segments connected to form a closed polygonal chain. A regular polygon is a polygon that is both equiangular (all angles are equal in measure) and equilateral (all sides have the same length).
The dihedral group Dn is the group of symmetries of a regular polygon with n vertices, which includes rotations and reflections or, in other words, the right motions taking a regular n-gon back to itself, or the arrangement of the figure preserving sides, vertices, distances, and angles.
A regular polygon can be rotated around its center in n different ways to come back to itself. More specifically, we can rotate it around the center by
$\frac{2kπ}{n}$ radians where 0 ≤ k ≤ n − 1 (Figure 1.a).
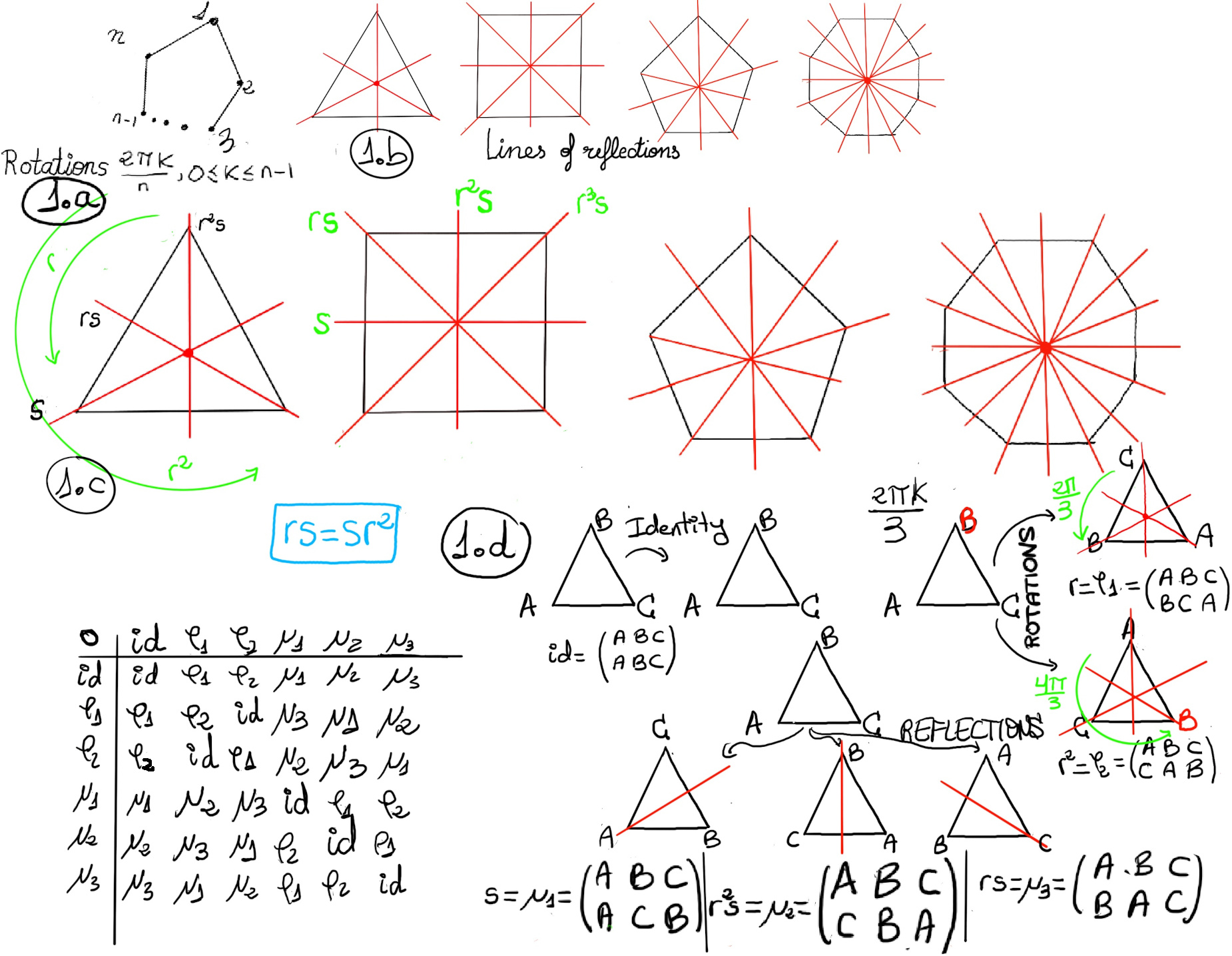
Any regular n-gon can be inscribed into a circle whose center coincides with the center of the n-gon. As the side lengths of the polygon are irrelevant in terms of symmetry, we could assume that our polygon is inscribed in the unit circle.
Let be r the counterclockwise rotation by θ = 2π⁄n, then the n rotations in Dn are e, r, r2,…, rn-1, namely, 1, e2π/n, e2(2π/n), e3(2π/n),···, e(n-1)(2π/n), Figure 01.
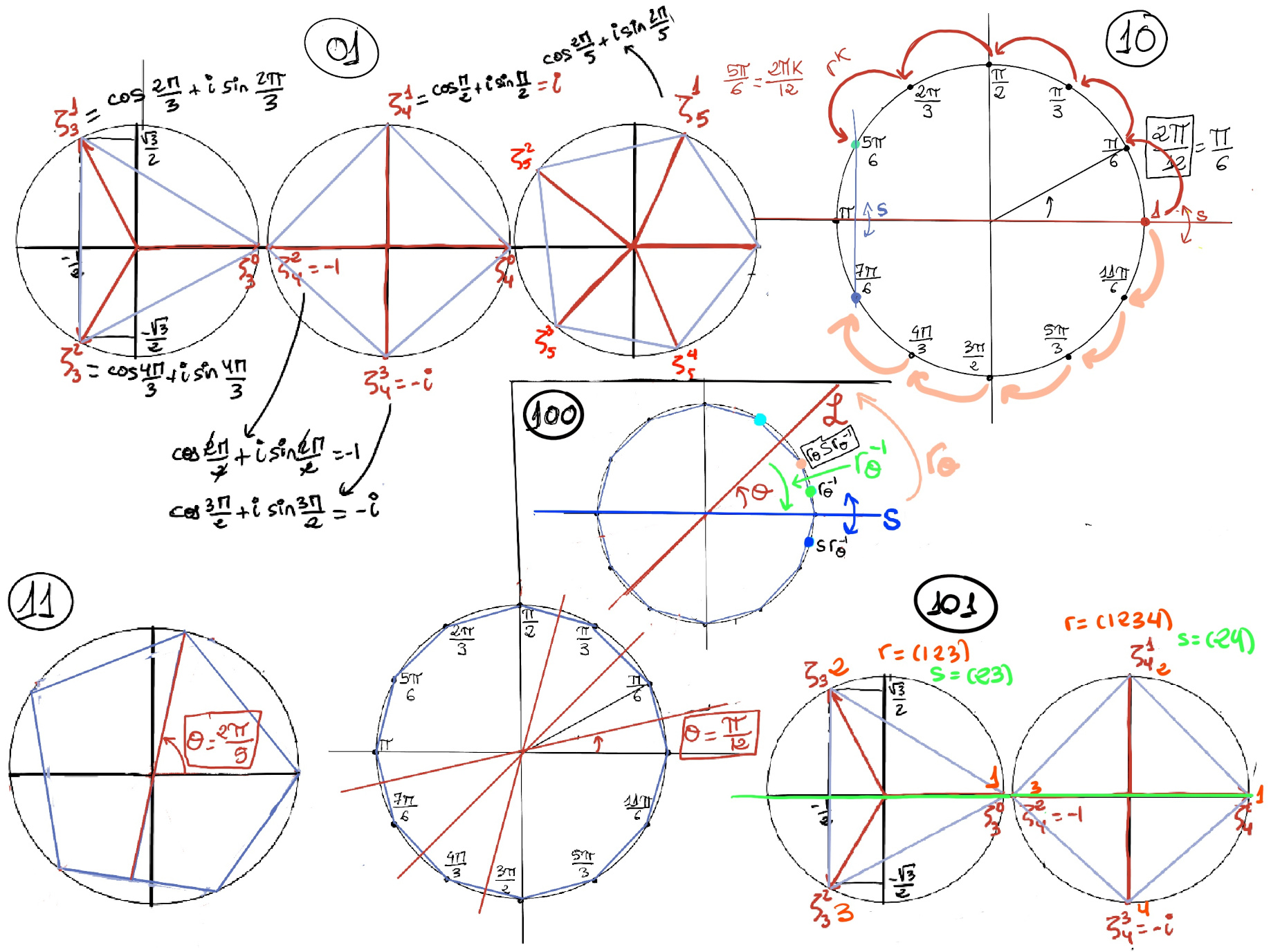
Theorem. Let s be a reflection across the real axis. Let Dn be the dihedral group. Then, srks-1 = r-k. In particular, srk = r-ks (by multiplying the previous equation by s).
Proof.
Consider srks-1 = [s2 = 1 ⇒ s = s-1] srks = [srks means to reflect across the x-axis, then rotate by θ = 2πk⁄n counterclockwise, that is, k rotations by r = 2π⁄n counterclockwise, and finally reflect across the x-axis back, but this is just a rotation by θ but clockwise, that is, k rotations by r-1 clockwise, Figure 10. It is illustrated with P(1, 0)] (r-1)k = r-k ∎
Theorem. Dn is generated by the symmetries r and s, Dn = ⟨r, s⟩. In particular, every symmetry σ can be expressed in the form σ = rksl for k, l ∈ ℤ.
Proof.
We already know that the only symmetries of the unit circle are rotations and reflections. These are the only types of symmetries for the regular n-gon which is a subset of the unit circle.
Let rθ be the rotation counterclockwise by θ. ρ = $r_θsr_θ^{-1}$ (Figure 100, rθ-1 is the rotation clockwise by θ) = [By the previous lemma, srks-1 = r-k, srk = r-ks, and sr-k = s2rks-1 = rks-1 = rks, the angle θ that L makes with the positive real axis equals $k\frac{π}{n}$ for some k] rθrθs = r2θs = [2θ = 2kπ/n, r is the rotation of 2π/n counterclockwise] rks ⇒ Every symmetry of our n-gon is generated by both r and s.
Each product of r’s and s’s is called a word, and we can simplify words by collapsing down adjacent r’s and s’s together, and we can consider that we don’t need inverses since s2=1 (s = s-1) and srk = r-ks. Therefore, a generic word in Dn has the following form, $σ=r^{k_0}sr^{k_1}sr^{k_2}···sr^{k_m}$ (k0 and km could be zero, that is, a generic word can start and/or end with a rotation or a reflection).
Claim: σ = rksl for k, l ∈ ℤ.
Let’s induct on the number of s’s in σ.
Case base. The number of s’s is 0 ⇒ σ = rk0 = rk0s0.
Suppose that if σ involves m-1 s’s, then σ = rksl for some k, l ∈ ℤ.
$σ=r^{k_0}sr^{k_1}sr^{k_2}···sr^{k_m}=(r^{k_0}sr^{k_1}sr^{k_2}···sr^{k_{m-1}})sr^{k_m}$ = [By our induction hypothesis] $(r^ks^l)sr^{k_m}=r^ks^{l+1}r^{k_m}$ =
Notice: s···l+1 times···sr···km times···r = … [By the previous lema, srk=r-ks each of the km r’s can be flipped by an s and needs to be moved l+1 times] = s···l times lefts to go···(r-1s)·r···km-1 times···r = r(-1)l+1s···l+1 times···sr···km-1 times···r
= $r^kr^{(-1)^{l+1}}··_{k_m}··r^{(-1)^{l+1}}s^{l+1} = r^kr^{(-1)^{l+1}k_m}s^{l+1}$ ∎
Lemma. Every symmetry σ can be expressed in the form σ = rksl for k, l ∈ ℤ. It is called the normal form of σ and is unique up to modulo n on k and modulo 2 on l.
Proof.
Let’s suppose by reduction to the absurd that σ = rksl = rk’sl’ ⇒ r-k’rk = sl’s-l, the product of rotations is itself a rotation, and the product of reflections is also a reflection, that’s impossible, therefore the only option left is the identity.
r-k’rk = sl’s-l ⇒ r-k’rk = sl’s-l = id ⇒ rk = rk’ and sl’ = sl ⇒ k ≡ k’ (mod n) and l ≡ l’ (mod 2) since s2 = rn = e∎
Theorem. The size of Dn is 2n.
Proof.
We have already demonstrated in the previous lemma that ∀σ ∈ Dn, σ = rksl and this expression is unique up to modulo n on k and module 2 on l since s2 = rn = e, so the options are 0 ≤ k ≤ n-1 and 0 ≤ l ≤ 2 ⇒ |Dn| = 2n ∎
Theorem. Let s be reflection across a line through a vertex. The n reflections in Dn are s, rs, r2s,..., rn-1s. Figure 1.b and 1.c.
Proof. The rigid motions s, rs, r2s,…, rn-1s are different since e, r, r2,…, rn-1 are different. Futhermore, s is not a rotation. Then, we claim that rks is not a rotation either.
Suppose for the sake of contradiction, rks is a rotation ⇒ rks = rl ⇒ s = rl-k, but s is not a rotation, but a reflection ⊥ (contradiction).
Therefore, Dn = {e, r, r2,…, rn-1, s, rs, r2s,…, rn-1s}
A reflection has order 2, so s2 = 1 and s-1 = s. The elements of Dn are rotations or reflections and the product of a rotation and a reflection is always a reflection. The geometric interpretation of s, rs, r2s,…, rn-1s is as follows: starting from a vertex fixed by s, we draw all lines of reflections for a regular n-gon by moving clockwise $\frac{2kπ}{n}$ radians where 0 ≤ k ≤ n − 1.
The rigid motions r and s do not commute, but srn-1 = rs, and therefore Dn = {e, r, r2,…, rn-1, s, rs, r2s,…, rn-1s} = ⟨r, s | rn = s2 = e, rs = srn-1⟩.
A reflection is a transformation that acts like a mirror. A line that reflects a figure onto itself is called a line of symmetry.
Exercise. Let n = 6. Compute rsr4sr3 = [∴ Associativity] (rs)r4sr3 = [∴ n=6, rs=srn-1=sr5] sr5r4sr3 = sr9sr3 = [∴ r9 = r3, 9 ≡6 3] sr3sr3 = (sr3)2 = [A rotation compose with a reflection is always a reflection and a reflection compose with itself is the identity] e.
Theorem. rks = srn-k, 1 ≤ k ≤ n-1.
Proof. Induction. Base case (k = 1) is already based on the definition of the dihedral group, Dn = ⟨r, s | rn = s2 = e, rs = srn-1⟩.
Let’s assume that the hypothesis holds for k.
rk+1s = r (rks) = [k induction hypothesis] r(srn-k) = [Associativity] (rs)rn-k = srn-1rn-k = srn+n-(k+1) = [rn = e] srn-(k+1) ∎
D3 is the symmetry group of the equilateral triangle. An equilateral triangle is a triangle in which all three sides are the same length, that is, a regular polygon with three equal sides with angles of the same measure (60°).
D3 = {id (e), rotations (ρ1 -120° around the center anticlockwise-, ρ2 -240°-), reflections or mirror images on all its vertices (μ1, μ2, and μ3)} = {e, r, r2, s, rs, r2s} = ⟨r, s | r3 = s2 = e, rs = sr2⟩.
D3 is not Abelian, e.g., ρ1μ1 = (123)(23) = (12) = μ3 ≠ μ1ρ1 = (23)(123) = (13) = μ2
A square is a regular quadrilateral (four-sided polygon), which means that it has four equal sides and four equal right angles (90° angles, π/2 radian angles). The dihedral group D4 is the symmetry group of the square.
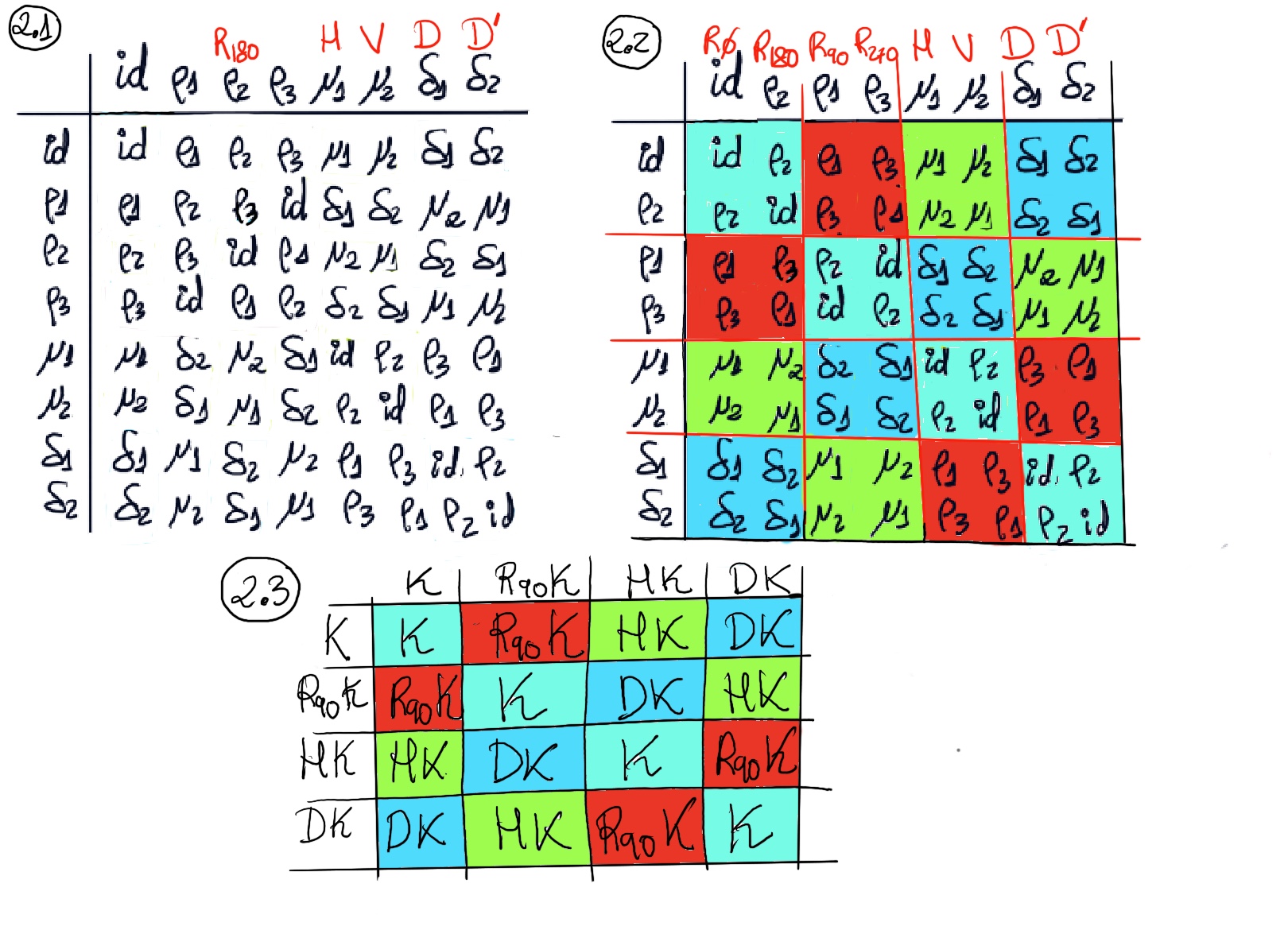
D4 = {id (e), rotations (ρ1 -90° around the center anticlockwise-, ρ2 -180°-, and ρ3 -270°-), reflections or mirror images in the x -horizontal- and y -diagonal- axes (μ1, μ2), and reflections in the diagonals δ1 and δ2 respectively} = {e, r, r2, r3, s, rs, r2s, r3s} = ⟨r, s | r4 = s2 = e, rs = sr3⟩.
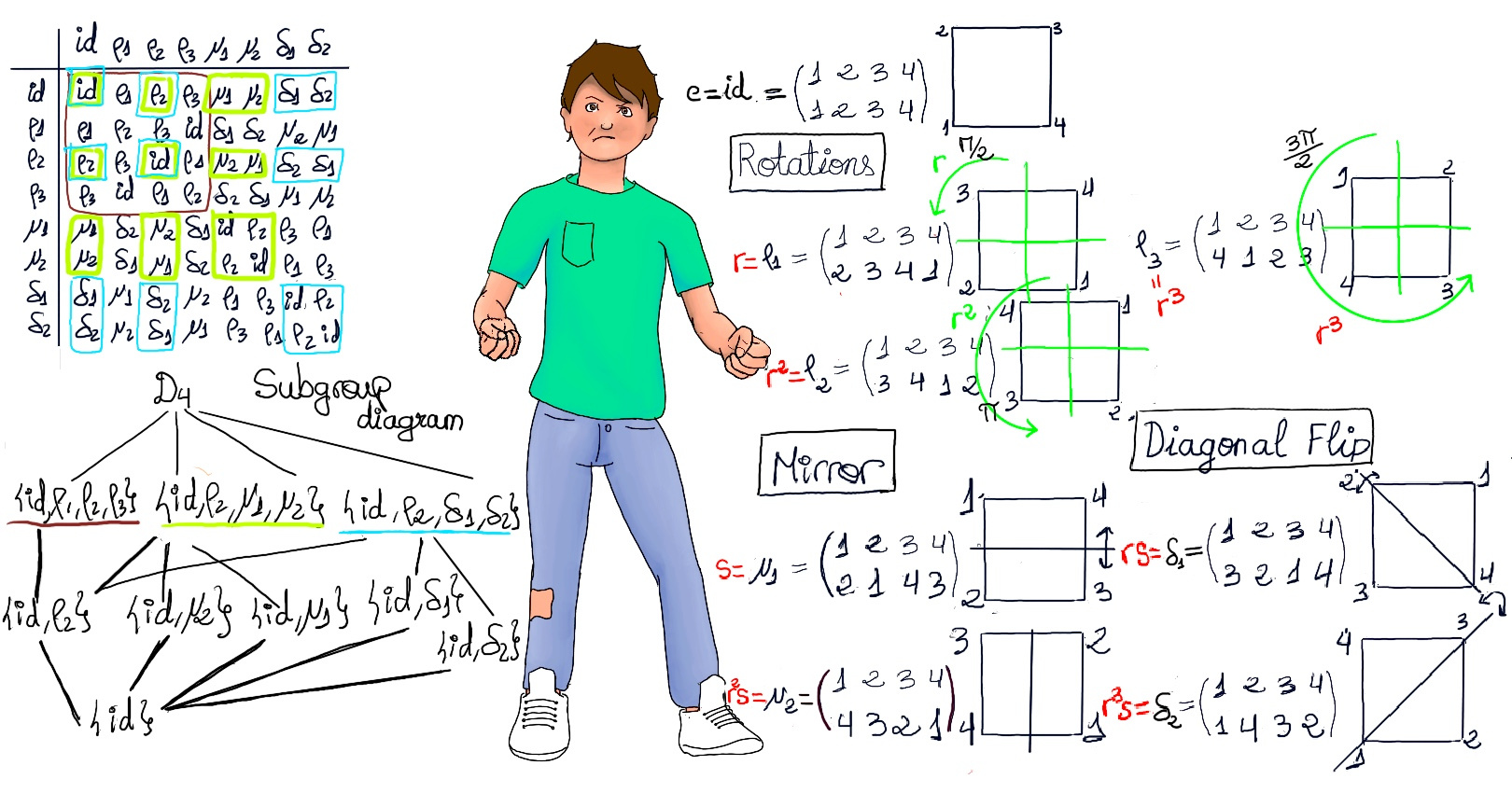
D4 is not Abelian, e.g. μ1ρ1 = (12)(34)(1234) = (24) = δ2 ≠ ρ1μ1 = (1234)(12)(34) = (13) = δ1.
$K$ = {R0, R180} = ⟨R180⟩. Let $K$ be the subgroup of D4 generated by R180, this subgroup is normal, $K$ ◁ D4.
$D_4/K$ = {$K, R_{90}K, HK, DK$} where $K$ = {R0, R180}, $R_{90}K$ = {R90, R270}, $HK$ = {HR0, HR180} = {H, V}, $DK$ = {DR0, DR180} = {D, D’}.
Its multiplication table is given in Table 2.3. Observe that the multiplication table for D4 can be simplified into small boxes that are cosets of $K$. We can represent an entire box by a single element of the box!
Definition. The center of a group, G, is the set of elements that commute with all the elements of G. Z(G) = {g ∈ G | gx = xg, ∀x ∈ G}.
Center of Dn ℤ(Dn) = $ \begin{cases} e, n~is~ odd\\\\ e~ and~ α^{\frac{n}{2}}, n~is~ even \end{cases}$
The dihedral group Dn is the group of symmetries of a regular polygon with n vertices, which includes rotations and reflections or, alternatively, the rigid motions taking a regular n-gon back to itself. Dn = {e, r, r2,…, rn-1, s, rs, r2s,…, rn-1s} = ⟨r, s | rn = s2 = e, rs = srn-1⟩.

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.