|
 |
 |
|
|
|
|
Definition. A vector $\vec{AB}$ is a geometric object that has magnitude (or length) and direction. Vectors in an n-dimensional Euclidean space can be represented as coordinates vectors in a Cartesian coordinate system.
Definition. The magnitude or length of the vector $\vec{A}$ is given by $|\vec{A}|~ or~ ||\vec{A}|| = \sqrt{a_1^2+a_2^2+a_3^2}$, e.g., $||< 3, 2, 1 >|| = \sqrt{3^2+2^2+1^2}=\sqrt{14}$, $||< 3, -4, 5 >|| = \sqrt{3^2+(-4)^2+5^2}=\sqrt{50}=5\sqrt{2}$, or $||< 1, 0, 0 >|| = \sqrt{1^2+0^2+0^2}=\sqrt{1}=1$.
The dot or scalar product is a fundamental operation between two vectors. It produces a scalar quantity that represents the projection of one vector onto another. The dot product is defined as follows: $\vec{A}·\vec{B} = \sum a_ib_i = a_1b_1 + a_2b_2 + a_3b_3,$ e.g. $\vec{A}·\vec{B} = \sum a_ib_i = ⟨2, 2, -1⟩·⟨5, -3, 2⟩ = a_1b_1 + a_2b_2 + a_3b_3 = 2·5+2·(-3)+(-1)·2 = 10-6-2 = 2.$
Definition. The cross product, denoted by $\vec{A}x\vec{B}$, is a binary operation on two vectors in three-dimensional space. It is a vector that is perpendicular to both of the input vectors (perpendicular to the parallelogram) and has a magnitude equal to the area of the parallelogram formed by the two input vectors.
The direction of the resulting vector is determined by the right-hand rule: if you curl the fingers of your right hand from $\vec{A}$ to $\vec{B}$ (first finger points $\vec{A}$, second finger points to $\vec{B}$), your thumb points in the direction of $\vec{A} \times \vec{B}$.

Matrices provide an efficient way to solve systems of linear equations,
$(\begin{smallmatrix}2 & 3 & 3\\ 2 & 4 & 4\\ 1 & 1 & 2\end{smallmatrix}) (\begin{smallmatrix}x_1\\ x_2\\ x_3\end{smallmatrix}) = (\begin{smallmatrix}u_1\\ u_2\\ u_3\end{smallmatrix}) ↭ A · X = U$ (more convenient and concise notation) where we do the dot products between the rows of A (a 3 x 3 matrix) and the column vector of X (a 3 x 1 matrix).
Given a square matrix A, an inverse matrix A-1 exists if and only if A is non-singular, i.e., its determinant is non-zero (det(A)≠ 0). The inverse matrix of A, denoted as A-1, is a matrix such that when multiplied by A yields the identity matrix, i.e., $A \times A^{-1} = A^{-1} \times A = I$
A point is the intersection of two lines, a line is the intersection of two planes, and a plane is the intersection of 3D figures.
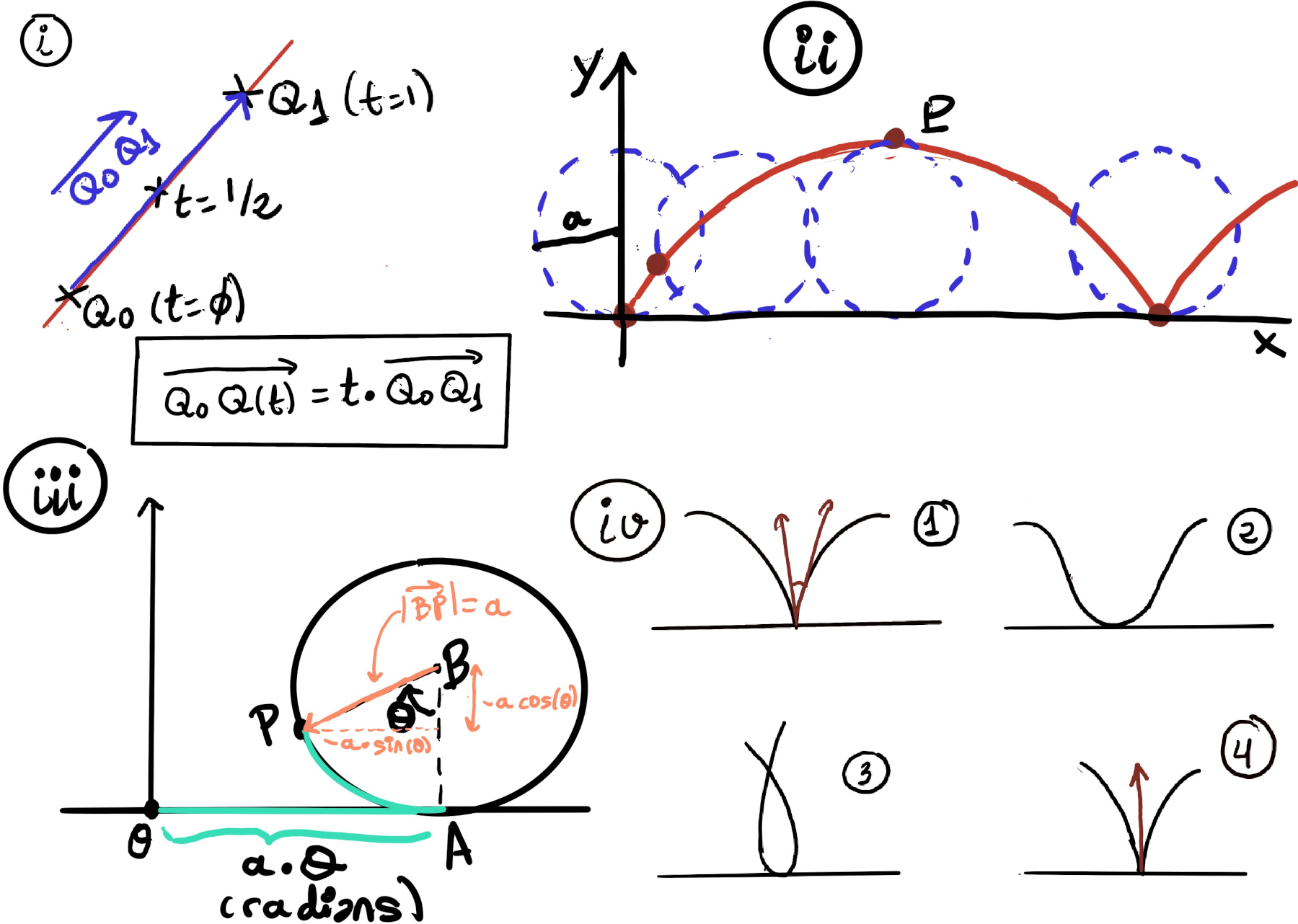
The equation y = mx + b does not describe a line in ℝ3, instead it describes a plane. A line is the path or trajectory of a moving point, say Q(t) where at t = 0 it is at Q0, t = 1 it’s at Q1, and at time t is at Qt and $\vec{Q_0Q(t)}=t\vec{Q_0Q_1}$ because it moves at a constant speed, e.g., Q0 = (-1, 2, 2), Q1 = (1, 3, -1), then $\vec{Q_0Q(t)}=t\vec{Q_0Q_1} = t⟨2, 1, -3⟩$ or Q(t) = (x(t), y(t), z(t)) (Figure i).
$\begin{cases} x(t) + 1 = 2t \ y(t) -2 = t \ z(t) -2 = -3t \end{cases}$
We can rewrite it in a more familiar way,
$ \begin{cases} x(t) = - 1 + 2t \ y(t) = 2 + t \ z(t) = 2 -3t \end{cases}$
First, Q0 ($x+2y+4z\bigg|_{(-1, 2, 2)} = -1+4+8=11$ > 7) and Q1 (1+2·3+4·(-1)=3 < 7) are not in the plane, so Q0 and Q1 are on opposite sides of the plane ⇒ the line intersect the plane.
To know where the line intersect the plane, we just need to plug the line’s equation in the plane’s equation, x(t) + 2y(t) + 4z(t) = 7 ↭ (-1 + 2t) + 2(2 + t) + 4(2 -3t) = 7 ↭ -8t + 11 = 7 ↭ -8t = -4 ↭ 2t = 1. Q(t) is in the plane ↭ t = 1⁄2, i.e., halfway Q0 and Q1, hence the line intersects the plane x + 2y + 4z = 7 at $Q(\frac{1}{2}) = (0, \frac{5}{2},\frac{1}{2}).$
If the line is in the plane, after plugging the line’s equation in the plane’s equation, we will obtain 7. Otherwise, if the line is parallel to the plane, we will obtain a constant.
A parametric equation defines a group of quantities as functions of one or more independent variables called parameters. It is a set of equations with more than one dependent variables, e.g., x = x(t), y = y(t), that defines or specifies the (dependent) variables x and y as functions of a parameter or independent variable t.
Parametric equations are often used to describe arbitrary motion in the plane or in space, where the x, y, and z coordinates vary with some other parameter, such as t (time) or even θ (e.g., a particular angle).
A cycloid is the path traced out by a point P on the rim of a wheel (radius a) as it rolls along a straight line (without slipping, the x axis). P is a point on the rim of a wheel, and starts at 0.
We are going to describe x and y as a function of the angle θ by which the wheel has rotated (Figure ii and iii).
$\vec{OP} = \vec{OA} + \vec{AB} + \vec{BP}$ where $\vec{OA} = ⟨θ·a, 0⟩$ (provided the angle θ is expressed in radians and the wheel is not slipping) the amount by which the wheel has moved $\vec{OA}$ is equal to the Arc length from A to P, $\vec{AB} = ⟨0, a⟩, \vec{BP} = ⟨-a·sin(θ), -a·cos(θ)⟩$
Therefore, $\vec{OP} = \vec{OA} + \vec{AB} + \vec{BP} = ⟨aθ -asin(θ), a - acos(θ)⟩.$
If we want to know what is going on near the bottom point (Figure iv, i.e., the angle approaches zero θ ≈ 0), let’s simplify by assuming that a = 1, x(θ) = θ - sin(θ), y(θ) = 1 -cos(θ). We can also use Taylor approximation for t small, $f(t) ≈ f(0) + tf’(0) + \frac{t^2f’’(0)}{2} + \frac{t^3f’’’(0)}{6}$ is a pretty good approximation. In our particular case, $cos(θ) ≈ 1 -\frac{θ^2}{2}, sin(θ)≈θ -\frac{θ^3}{6}$
Therefore, $x(θ) = θ - sin(θ) ≈ θ -(θ -\frac{θ^3}{6}) = \frac{θ^3}{6}, y(θ) = 1 - cos(θ) ≈ 1 -(1 -\frac{θ^2}{2}) = \frac{θ^2}{2}, \frac{y(θ)}{x(θ)}=\frac{\frac{θ^2}{2}}{\frac{θ^3}{6}} = \frac{3}{θ} = ∞$ as θ approaches zero ⇒ slope at origin is infinite, so the graph is 4.
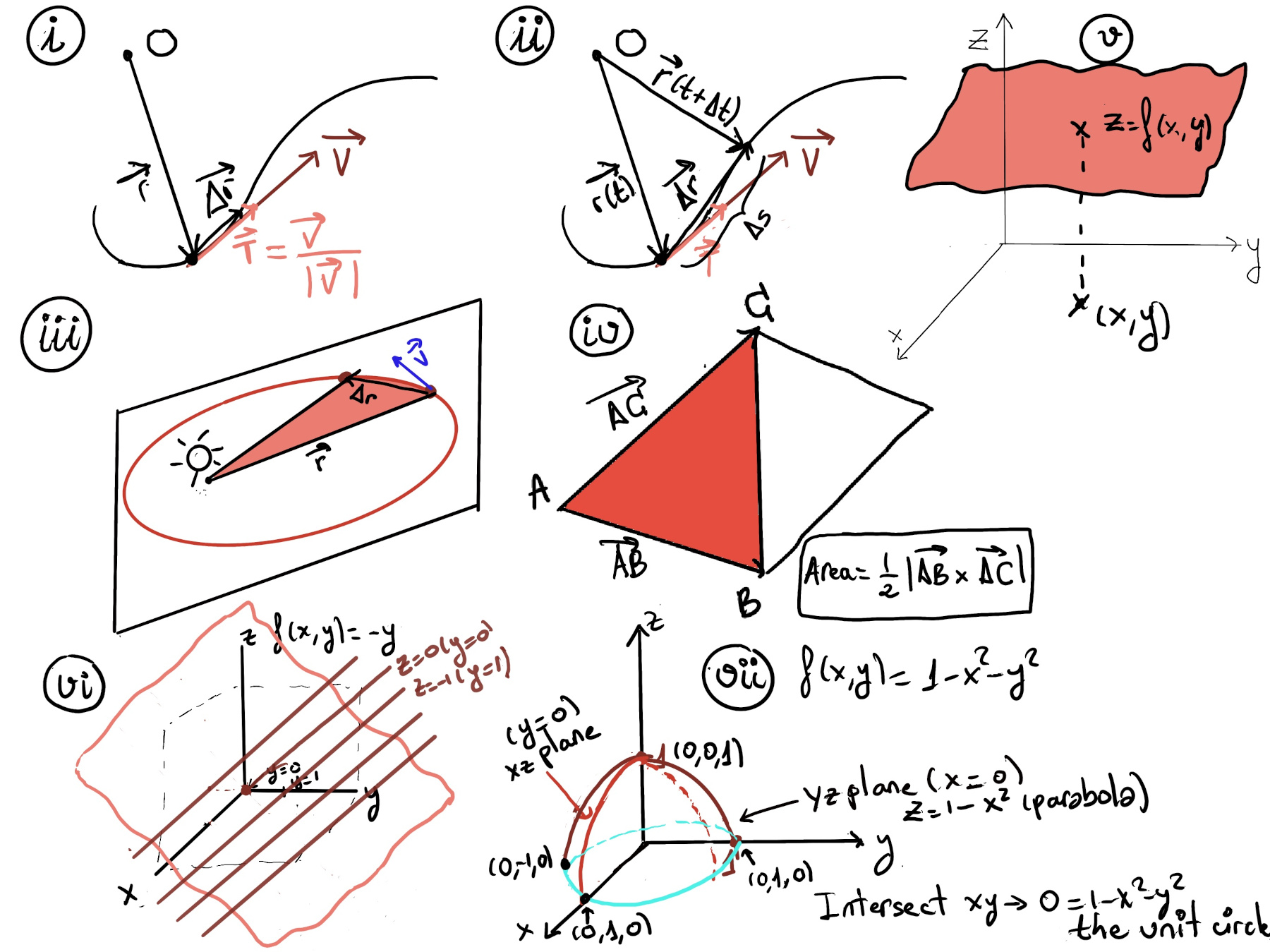
Definition. A position vector is defined as a vector that indicates the position or the location of any given point with respect to any arbitrary reference point, $\vec{OP}=\vec{r}(t) = ⟨x(t), y(t), z(t)⟩$, e.g., a cycloid of a wheel moving at unit speed along the unit circle, so time and angle are the same thing, $\vec{r}(t) = ⟨t -sin(t), 1 -cos(t)⟩$
Velocity is a vector measurement because it has an amount and a direction. Velocity is the rate of change of position, $\vec{v} = \frac{d\vec{r}}{dt} = ⟨\frac{dx}{dt}, \frac{dy}{dt}⟩$, e.g., in our cycloid $\vec{v} = ⟨1-cos(t), sin(t)⟩$.
As we have previously stated, the velocity of a particle, denoted as $\vec{v}$, is a vector in the direction of motion. Its magnitude is therefore the speed of the particle, $|\vec{v}| = \sqrt{(1-cos(t))^2 + sin^2(t)} = \sqrt{1 -2cos(t) + cos^2(t)+ sin^2(t)} = \sqrt{2 -2cos(t)} $
The acceleration vector is defined as the derivative of the velocity vector with respect to time $\vec{a} = \frac{d\vec{v}}{dt}$, e.g., in our cycloid $\vec{a} = ⟨sin(t), cos(t)⟩$. Observe at t = 0, $\vec{v} = \vec{0}, \vec{a} = ⟨0, 1⟩$, the point is slowing down, then it stops, and then it goes back up.
Arc length is the distance traveled by an object from one point to another point along a curve. Since the speed of a moving object is the length of its velocity vector, the distance the object travels from t = a to t = b should be the integral of |r’(t)| over the interval [a, b], but also this will be the arc length of the curve parametrized by r(t), a ≤ t ≤ b, e.g., length of an arch in our cycloid is $\int_{0}^{2π} \sqrt{2 -2cos(t)}dt$
Definition. A unit tangent vector is a vector that points in the direction of the tangent to a curve at a given point. It has magnitude (or length) equal to 1 and its direction is the same as that of the tangent to the curve. The unit tangent vector is used to describe the direction of motion along a curve and can be used to calculate the derivative of a curve at a given point, $\vec{T} = \frac{\vec{v}}{|\vec{v}|}$.
Therefore, $\vec{v}=\frac{d\vec{r}}{dt}$ =[The Chain Rule] $\frac{d\vec{r}}{ds}·\frac{ds}{dt}$
As we know $|\vec{v}|=\frac{ds}{dt}⇒ \vec{v}=\frac{d\vec{r}}{dt}=\frac{d\vec{r}}{ds}·\frac{ds}{dt} = \vec{T}·\frac{ds}{dt}$
To sum up, velocity, being a vector, has both a magnitude and a direction. Its direction is always directed tangent to the object’s motion or trajectory. Its length is the speed, $|\vec{v}|=\frac{ds}{dt}$ or, saying with other words, the speed is the length of the velocity vector, and is therefore a scalar quantity.
Futhermore (Figure i and ii), $\Delta r ≈ \vec{T}·\Delta s, \frac{\Delta s}{\Delta t} ≈ speed.$ Of course if I divided by $\Delta t, \frac{\Delta r}{\Delta t} ≈ \vec{T}·\frac{\Delta s}{\Delta s}$ and take the limit as $\Delta t → 0 ⇒ \frac{d\vec{r}}{dt}=\vec{T}·\frac{ds}{dt}$ that is the previous formula where the approximation becomes an equality (the approximation gets better and better).
Kepler’s first law states that all planets orbit the Sun in an elliptical orbit, with the Sun at one of the ellipse’s foci. His second law states that planets move in planes, and the imaginary line joining a planet and the Sun (aka, the radius vector) sweeps equal areas of space during equal time intervals as the planet orbits.
Basically, that planets do not move with constant speed along their orbits. Rather, their speed varies so that the line joining the centers of the Sun and the planet sweeps out equal parts of an area in equal times. It establishes that planets move faster near the Sun and slowly away from the Sun to cover equal areas in equal intervals of time (Figure iii).
Later on, Newton developed a theory to explain why the planets move according to Kepler’s laws.
Recall that the magnitude of the product u × v is by definition the area of the parallelogram spanned by u and v when placed tail-to-tail. Hence we can use the vector product to compute the area of a triangle formed by three points A, B and C in space, A = $\frac{1}{2}|\vec{AB}x\vec{AC}|$ (Figure iv).
$Area = \frac{1}{2}$ Area Parallelogram $\vec{r}, \vec{\Delta r} = \frac{1}{2}|\vec{r} x \vec{\Delta r}|$ (Area swept in time $\Delta t$ by the planet) ≈ $\frac{1}{2}|\vec{r} x \vec{v}\Delta t| = \frac{1}{2}|\vec{r} x \vec{v}|\Delta t$. Kepler’s second law means that $|\vec{r} x \vec{v}|$ is constant.
Futhermore, planets move in planes ⇒ the plane of motion contains both both $\vec{r}$ and $\vec{v}$ ⇒the direction of their cross product $\vec{r}x\vec{v}$ is perpendicular to this plane. Therefore, taking into consideration that $|\vec{r} x \vec{v}|$ is constant, $\vec{r} x \vec{v}$ is a constant vector, that is, $\frac{d}{dt}(\vec{r} x \vec{v}) = 0↭ \frac{d\vec{r}}{dt}x\vec{v} + \vec{r} x \frac{d\vec{v}}{dt} = 0 ↭ \vec{v}x\vec{v}+\vec{r}x\vec{a} = 0$ ↭ [Recall $∀\vec{v}, \vec{v}x\vec{v}=0$] $\vec{r}x\vec{a} = 0$ [A cross product of two vectors generates a perpendicular vector to both vectors. The two vectors are parallel if the cross product of their cross products is zero] $\vec{a} || \vec{r}$ ↭[Gravitational acceleration is the acceleration an object experiences when gravity is the only force acting on it] gravitational force $ || \vec{r}$

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.