|
 |
 |
|
|
|
|
No pressure, no diamonds, Thomas Carlyle.
For every problem there is always, at least, a solution which seems quite plausible. It is simple and clean, direct, neat and nice, and yet very wrong, #Anawim, justtothepoint.com
Let’s say that we have a vector field $\vec{F} = P\hat{\mathbf{i}} + Q\hat{\mathbf{j}}+R\hat{\mathbf{k}}$ (e.g. it represents a force) and a curve C in space, the work done by the field is $\int_{C} \vec{F}d\vec{r}$ where $d\vec{r}$ is s space vector = ⟨dx, dy, dz⟩, hence $\int_{C} \vec{F}d\vec{r} = \int_{C} Pdx +Qdy + Rdz$
$\int_{C} \vec{F}d\vec{r} = \int_{C} Pdx +Qdy + Rdz = \int_{C} t^3t^2dt+t^42tdt + t^5dt = \int_{0}^{1} 6t^5dt = t^6\bigg|_{0}^{1} = 1.$
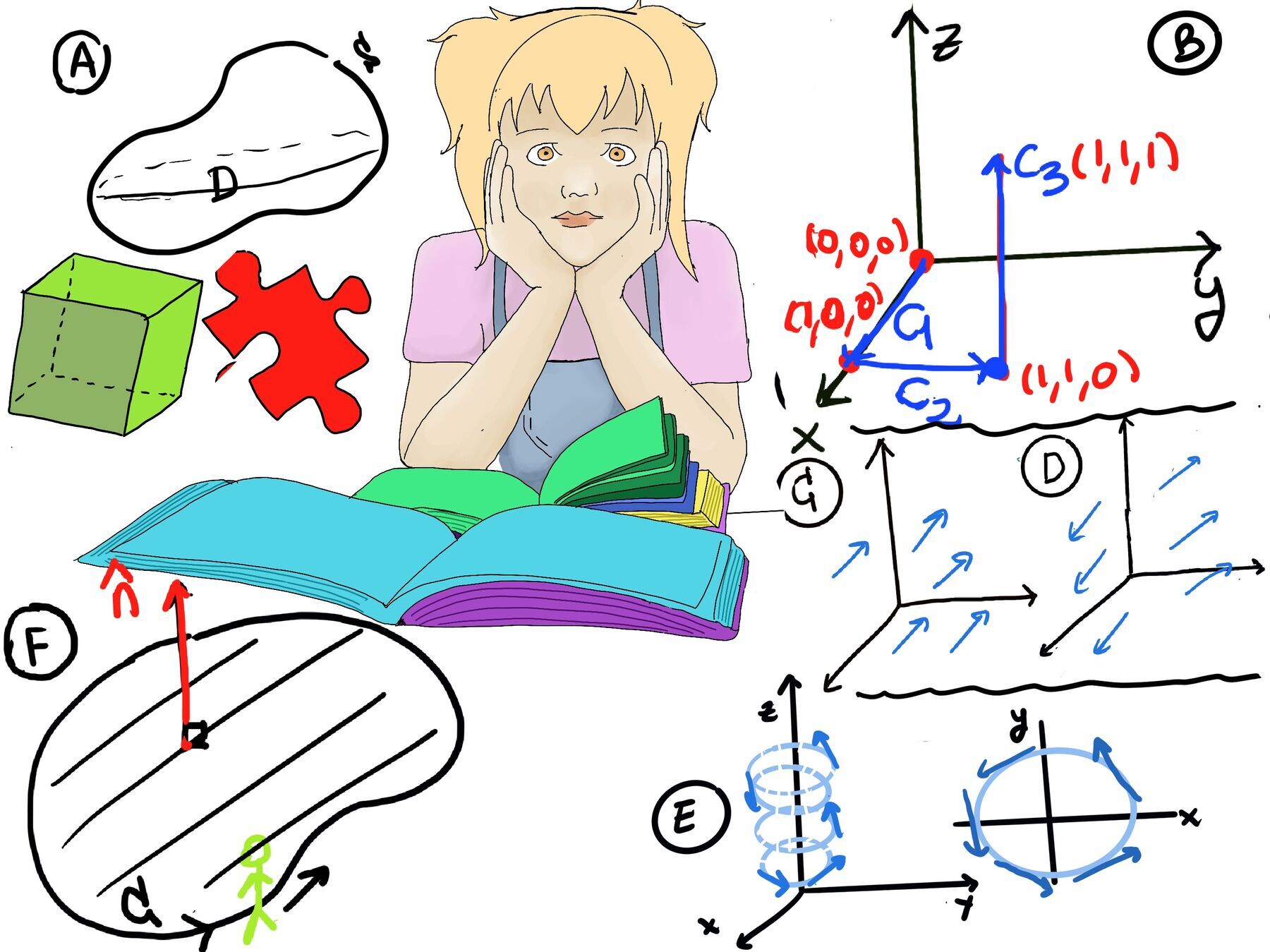
$\int_{C} \vec{F}d\vec{r} = \int_{C} Pdx +Qdy + Rdz = \int_{C} yzdx +xzdy + xydz = \int_{C_1} yzdx +xzdy + xydz + \int_{C_2} yzdx +xzdy + xydz + \int_{C_3} yzdx +xzdy + xydz$
C1, C2 live in the xy-plane ⇒ z = 0 ⇒ dz = 0, $\int_{C_1} yzdx +xzdy + xydz + \int_{C_2} yzdx +xzdy + xydz = 0$
C3: x =1, y = 1 (both are constants) ⇒ dx = dy = 0 ⇒$\int_{C_3} yzdx +xzdy + xydz = \int_{C_3}xydz = \int_{0}^{1} dz = 1$ ⇒ $\int_{C} \vec{F}d\vec{r} = 1$.
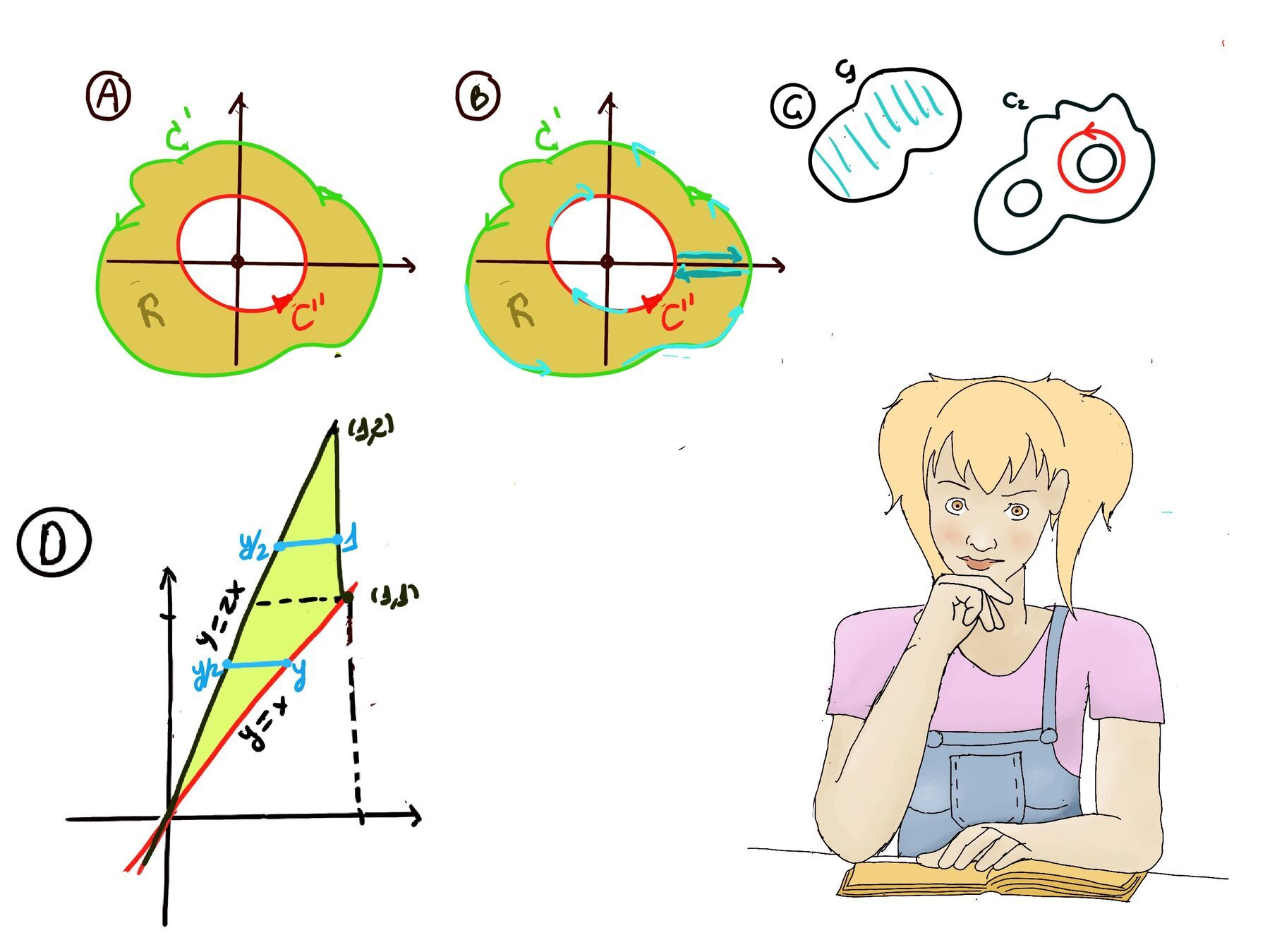
In fact, we get the same result because $\vec{F}$ is conservative because $\vec{F} = ∇(x·y·z) = ⟨yz, xz, xy⟩$ and these were two curves, say C and C’, that went from P0(0, 0, 0) to P1(1, 1, 1), hence $\int_{C} \vec{F}d\vec{r} = \int_{C’} \vec{F}d\vec{r}$
⇒[Fundamental Theorem of Calculus for line integrals] $\int_{C} \vec{F}d\vec{r} = \int_{C} ∇f d\vec{r} = f(P_1)-f(P_0) = f(1, 1, 1) - f(0, 0, 0) = 1 - 0 = 1$ where f(x, y, z) = x·y·z.
$\vec{F} = ⟨P, Q, R⟩ =¿? ⟨f_x, f_y, f_z⟩$. If so, then Py = fxy = fyx = Qx and Pz = fxz = fzx = Rx, and Qz = fyz = fzy = Ry
Criterion: $\vec{F} = ⟨P, Q, R⟩$ defined in a simple connected region ↭ Pdx + Qdy + Rdz is an exact differential df ↭ Py = Qx, Pz = Rx, and Qz = Ry.
$\int_{C} \vec{F}d\vec{r} = \int_{C} Pdx +Qdy + Rdz$.
The differential form is Pdx +Qdy + Rdz is axydx +(x2 +z3)dy + (byz2-4z3)dz where P = axy, Q = x2 +z3, R = byz2-4z3. We need to determine the values a and b such that the form is exact.
To do this, we first check the partial derivatives:
Py = ax = 2x = Qx ⇒ a = 2. Pz = 0 = 0 = Rx. Finally, Qz = 3z2 = bz2 = Ry ⇒ b = 3 ⇒Thus, the differential form becomes 2xydx + (x2+z3)dy +(3yz2 -4z3)dz
To find the potential function, we have two approaches:
Using the line integral, we integrate $\vec{F}$ along a curve C, $f(x_1, y_1, z_1) = \int_{C} \vec{F}d\vec{r} + constant$ where C would typically be (for easy calculations’ sake) a curve from (0, 0, 0) to (x, y, z) similar to Figure B.
Using the gradient. We find a function f(x, y, z) such that $\vec{F} = ∇f$.
$\int_{C} \vec{F}d\vec{r} = \int_{C} ∇f d\vec{r} = \int_{C} ⟨\frac{∂f}{∂x},\frac{∂f}{∂y},\frac{∂f}{∂z}⟩ d\vec{r} = \int_{C} f_xdx +f_ydy + f_zdz$ where $\vec{F}$ is the vector field, f is the scalar potential function, ∇f is the gradient of f, $d\vec{r}$ is the differential displacement vector along the curve C, and fx, fy and fz are the partial derivatives of f with respect to x, y, and z respectively.
The second approach involves integrating the partial derivatives of f with respect to each variable:
fx = 2xy ⇒[$\int f(x)dx$] f = x2y + g(y, z).
fy = x2 + z3 =[f = x2y + g(y, z), $\frac{∂f}{∂y} = $] x2 +gy ⇒ gy = z3 ⇒ g = yz3 + h(z)
fz = 3yz2 -4z3 =[Considering f = x2y +g = x2y +yz3 + h(z)] 3yz2+h’ ⇒ h’(z) = -4z3 ⇒ h = -z4 + c.
f = x2y + g(y, z) = x2y + yz3 + h(z) = x2y + yz3 -z4 + c.
Let our vector field $\vec{F} = P\hat{\mathbf{i}}+ Q\hat{\mathbf{j}}+R\hat{\mathbf{k}}, curl(\vec{F})=(R_y-Q_z)\hat{\mathbf{i}} + (P_z-R_x)\hat{\mathbf{j}}+(Q_x-P_y)\hat{\mathbf{k}}$
If the vector field $\vec{F}$ is defined in a simply connected region (without holes or topological obstacles in the region), then $\vec{F}$ is conservative (a vector field is said to be conservative if it is the gradient of a scalar function, $\vec{F}= ∇f$ where ∇ is the gradient operator) if and only if its curl equals the zero vector, curl($\vec{F}$) = 0 (gradient theorem ⇒ $\vec{F}$ is conservative if the circulation or line integral of $\vec{F}$ around any closed loop or curve is zero, hence if $\vec{F}$ is conservative, then its curl must be zero for any closed loop in the region).
Recall our previous notation, the operator ∇ = $⟨\frac{∂}{∂x},\frac{∂}{∂y},\frac{∂}{∂z}⟩$ and using this notation ∇f = $⟨\frac{∂f}{∂x},\frac{∂f}{∂y},\frac{∂f}{∂z}⟩$
Similarly, ∇·⟨P, Q, R⟩ = $⟨\frac{∂P}{∂x},\frac{∂Q}{∂y},\frac{∂R}{∂z}⟩ = div \vec{F}$
$∇ x \vec{F} = |\begin{smallmatrix}\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}}\\ \frac{∂}{∂x} & \frac{∂}{∂y} & \frac{∂}{∂z}\\ P & Q & R\end{smallmatrix}| = (\frac{∂R}{∂y}-\frac{∂Q}{∂z})\hat{\mathbf{i}}-(\frac{∂R}{∂x}-\frac{∂P}{∂z})\hat{\mathbf{j}} + (\frac{∂Q}{∂x}-\frac{∂P}{∂i})\hat{\mathbf{k}} = curl \vec{F}$
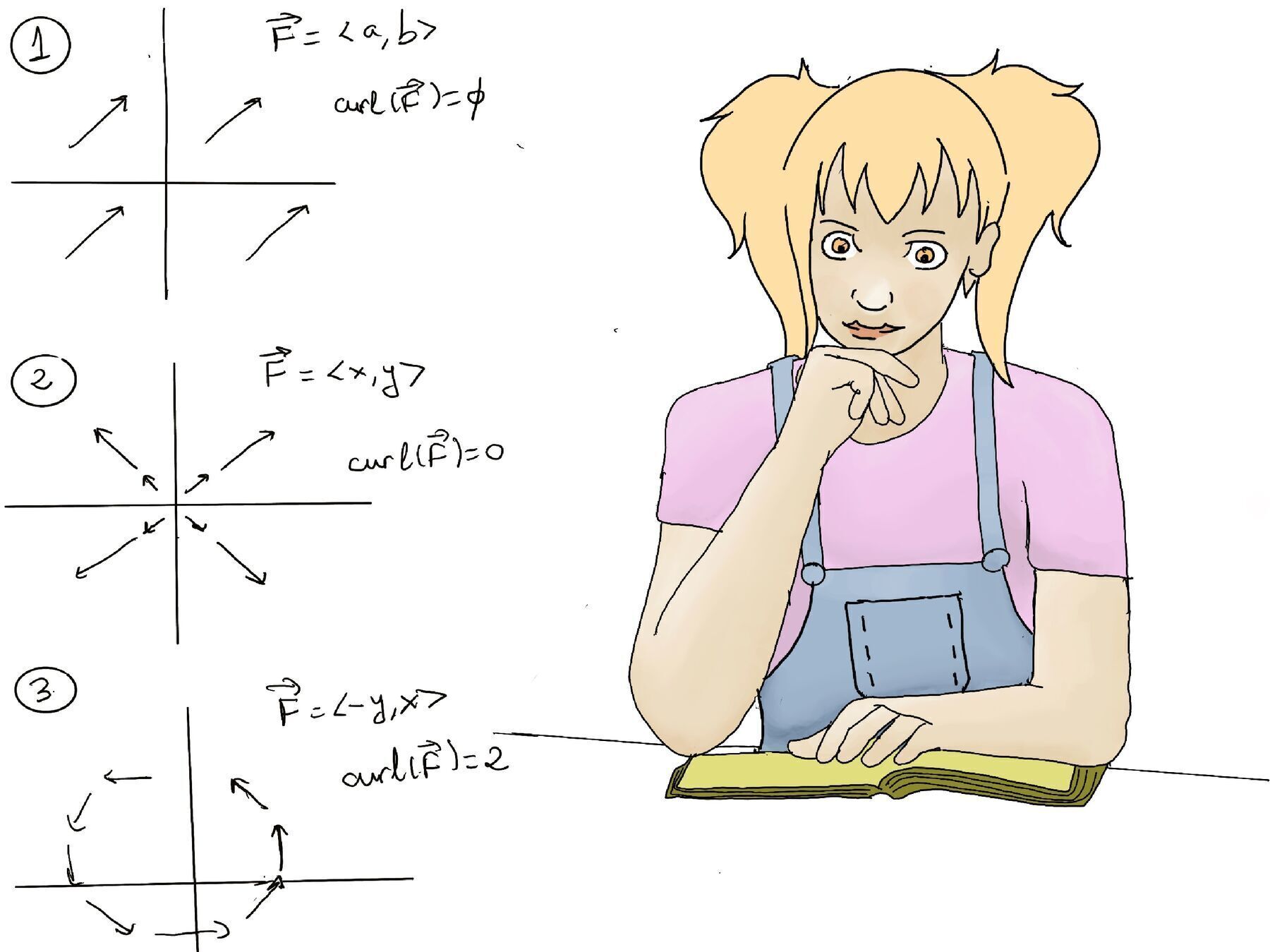
Geometrically, the curl measures the rotation component in a velocity field. For example, consider a velocity field $\vec{v}$ in some fluid that induces a rotation around the z-axis at an angular velocity w. The velocity field is given by $\vec{v} = ⟨-wy, wx, 0⟩$.
Computing the curl of $\vec{v}$, $curl \vec{v} = ∇ x \vec{v} = 2w\hat{\mathbf{k}}$. It indicates that the curl captures the rotational aspect of the velocity field with the magnitude 2w representing the strength of this rotation and the direction $\hat{\mathbf{k}}$ (the unit vector along the z-axis) along the z-axis indicating the axis of rotation.
Some examples:

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.