|
 |
 |
|
|
|
|
The best place to find a helping hand is at the end of your own arm, Swedish Proverb.
Double integrals play a crucial role in calculating areas, volumes, and other quantities in multivariable calculus. Let’s see some examples:
To find the area of a region R, the double integral of f(x, y) over R represents the volume under the surface defined by f(x, y) =1 within the region R, i.e., Area(R) = $\iint_R 1dA$
Suppose the density of the flat object is given by the function (δ(x, y)), where δ(x, y) represents the mass per unit area (mass density) at any point ((x, y)) within the region, Δm = δ·ΔA.
To find the total mass of the object over the region (R), we integrate the density function over the region: Mass = $\iint_R δ(x, y)·dA$ (it sums up the contributions of all these infinitesimal pieces of area withing the region) where dA represents an infinitesimal area element within the region (R).
Basically, to calculate the volume or total value we divide the region into small rectangles Rij, each with area ΔA; the volume of a very thin rectangular box above Rij is given by $f(x_{i}, y_{j}) \Delta A$, where $(x_{i}, y_{j})$ is an arbitrary sample point in each $R_{ij}$, and sum up the volume of all these thin rectangular boxes to find the total volume.
Similarly, we can compute the weighted average of a function f with a given density function δ(x, y) that assigns a weight to each point (x, y) in R. We’ll calculate the weighted average mass using a double integral, more specifically $\frac{1}{Mass(R)}\iint_R f·δ·\Delta A$ where ΔA represents the differential area in R.
The center of mass is the hypothetical unique point where the entire mass of an object may be assumed to be concentrated to visualize its motion, i.e., the weighted relative position where the object’s distributed mass sums to zero, $ x_{\text{centreMass}} = \frac{1}{\text{Mass}} \iint_R x \delta(x, y)dA, y_{\text{centreMass}} = \frac{1}{\text{Mass}} \iint_R y \delta(x, y) , dA$ where δ(x, y) represents the density function and R is the region in the XY-plane.
The moment of inertia is a fundamental property of a rotating object. It quantifies the object’s resistance to changes in its rotational motion. It depends on both its mass distribution and the distance of each mass element from the axis.
Kinetic energy is the energy associated with the motion of an object. For a rotating rigid body, its kinetic energy depends on both its mass distribution and its rotational motion. It can easily be determined by an equation using the mass and velocity of that object. It is one-half the product of the particle’s mass m and the square of its speed, $\frac{1}{2}mv^2$ where m = mass (Kg), v = velocity (n/s) -Figure iv a-
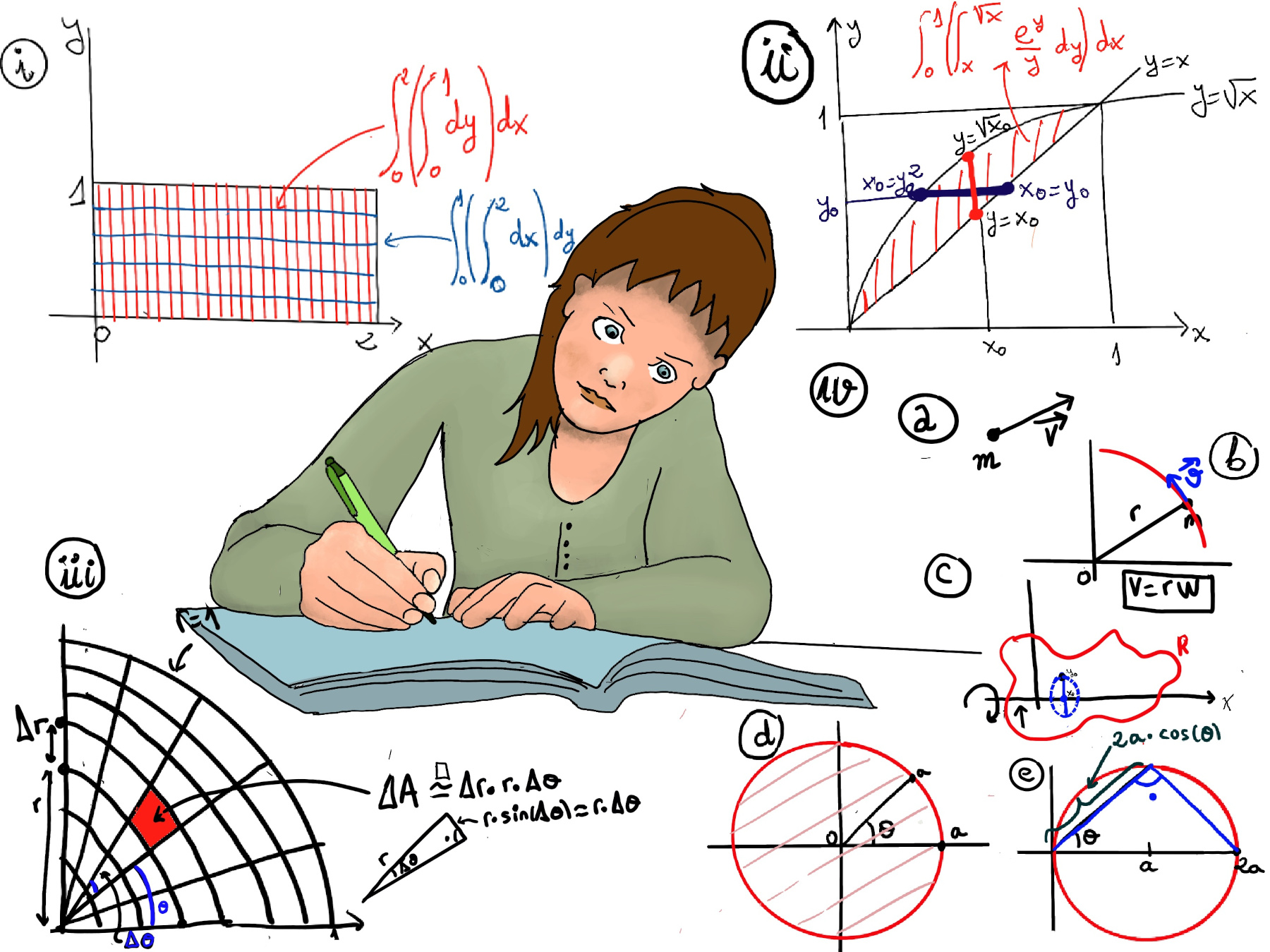
For a rotating rigid body, angular velocity (w) represents how fast an object rotates about a fixed axis, i.e., the rate at which it sweeps out an angle in a given time: w = $\frac{Δθ}{Δt}$ where Δθ is the change in angle (radians), Δt is the time it takes for this change to occur.
Linear velocity is the speed of an object moving along a straight path. Besides, in rotational motion, linear velocity is related to angular velocity and the distance from the axis of rotation (radius r).
For one rotation Δθ = 2π radians, Δt = T (the period of the time for one complete rotation), w = $\frac{Δθ}{Δt} = \frac{2π}{T}$. We all know that v = d/t, hence the lineal velocity is v = $\frac{2\pi r}{T} = r \omega$ ⇒ The formula for kinetic energy of an object in rotational motion is: $\frac{1}{2}mv^2 = \frac{1}{2}mr^2w^2$ where w is the angular velocity (in radians per second) and r represents the distance from the axis -Figure iv b-. The moment of inertia I is mr2. The kinetic energy of a rotating rigid body is directly proportional to its moment of inertia and the square of its angular velocity.
Mathematically, the moment of inertia around the origin is calculated by taking the double integral of the object’s mass distribution with respect to the distance from its axis of rotation $I = \iint r^2·dm =$[For a solid with density δ] $ \iint_{R} r^2·δdA.$ In polar coordinates, r2= x2 + y2, and the rotational kinetic energy is $\frac{1}{2}Iw^2$.
If we rotate about the x-axis, $ \iint_{R} y^2·δdA$ (Figure iv c).
Example. Let’s take a disk of radius a, δ = 1, what is its moment of inertia (Figure iv d). I = $ \iint_{R} r^2·δdA =\iint_{R} r^2·dA$ =[Recall from previous discussion, DA = rdrdθ] $\iint_{R} r^2·r·dθ = \int_{0}^{2π}(\int_{0}^{a} r^2rdr)dθ = \int_{0}^{2π} \frac{r^4}{4}\bigg|_{0}^{a}$
$= \int_{0}^{2π} \frac{a^4}{4}dθ = \frac{a^4}{4}θ\bigg|_{0}^{2π} = \frac{a^4}{4}·2π = \frac{πa^4}{2}$
Let’s do a variation, where we spin it around one its left extreme (Figure iv e)). I = $ \iint_{R} r^2·dA = \int_{\frac{-π}{2}}^{\frac{π}{2}}(\int_{0}^{2acos(θ)} r^2rdr)dθ$
$\int_{0}^{2acos(θ)} r^2rdr = \frac{r^4}{4}\bigg|_{0}^{2acos(θ)} = 4a^4·cos^4(θ)$
I = $ \int_{\frac{-π}{2}}^{\frac{π}{2}}(4a^4·cos^4(θ))dθ$ =[It is left as an exercise] $\frac{3}{2}π·a^4$.

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.