|
 |
 |
|
 |
|
|
|
|
|
|
Definition. Let X and Y be vector spaces over a field F. A function T : X → Y is a linear transformation if it preserves linear combinations, that is, ∀u, v ∈ X, c ∈ F:
Or, alternatively, T(c1u + c2v) = c1T(u) + c2T(v). In general T is a linear transformation if it preserves linear combinations, T(c1x1 + ··· + cnxn) = c1T(u) + ··· cnT(xn).
X and Y are called the domain and codomain of T, respectively; the image or range of T is the set of images, Img(T) = {T(x) | x ∈ X}; and the kernel of T is the set of vectors which map to the vector zero, that is, Ker(T) = {x | T(x) = 0}.
Examples:
$[ T(c_1x+c_2y)= T(c_1\left(\begin{smallmatrix}x_1\\ x_2\\ x_3\end{smallmatrix} \right)+c_2\left(\begin{smallmatrix}y_1\\ y_2\\ y_3\end{smallmatrix} \right)) = T\left(\begin{smallmatrix}c_1x_1+c_2y_1\\ c_1x_2+c_2y_2\\ c_1x_3+c_2y_3\end{smallmatrix} \right) = \left(\begin{smallmatrix}c_1x_1+c_2y_1+c_1x_3+c_2y_3\\ c_1x_2+c_2y_2-c_1x_1-c_2y_1\end{smallmatrix} \right) = \left(\begin{smallmatrix}c_1x_1+c_1x_3\\ c_1x_2-c_1x_1\end{smallmatrix} \right) + \left(\begin{smallmatrix}c_2y_1+c_2y_3\\ c_2y_2-c_2y_1\end{smallmatrix} \right) ] = c_1\left(\begin{smallmatrix}x_1+x_3\\ x_2-x_1\end{smallmatrix} \right) + c_2\left(\begin{smallmatrix}y_1+y_3\\ y_2-y_1\end{smallmatrix} \right) = c_1T\left(\begin{smallmatrix}x_1\\ x_2\\ x_3\end{smallmatrix} \right)+c_2T\left(\begin{smallmatrix}y_1\\ y_2\\ y_3\end{smallmatrix} \right) ] $
Exercise. Calculate the kernel and image of T: ℝ3 → ℝ2, T(x1, x2, x3) = (x1 + 2x2, x3 - 3x2).
$T(x)=0↭ \left( \begin{smallmatrix}x_1 + 2x_2\\ x_3-3x_2\end{smallmatrix} \right) = \left( \begin{smallmatrix}0\\ 0\end{smallmatrix} \right)$
$\begin{cases} x_1 + 2x_2 = 0 \\ x_3 -3x_2 = 0 \end{cases}↭ x_3=3x_2,~x_1=-2x_2$
ker(T)={$\left(\begin{smallmatrix}-2t\\ t\\ 3t\end{smallmatrix}\right): t ∈ ℝ$} = {t$\left(\begin{smallmatrix}-2\\ 1\\ 3\end{smallmatrix}\right): t ∈ ℝ$}
$T(x)=\left( \begin{smallmatrix}b_1\\ b_2\end{smallmatrix} \right)↭ \left( \begin{smallmatrix}x_1 + 2x_2\\ x_3-3x_2\end{smallmatrix} \right) = \left( \begin{smallmatrix}b_1\\ b_2\end{smallmatrix} \right)$
$\begin{cases} x_1 + 2x_2 = b_1 \\ x_3 -3x_2 = b_2 \end{cases}$ In particular, x2 = 0, and $T \left( \begin{smallmatrix}b_1\\ 0 \\ b_2\end{smallmatrix} \right) = \left( \begin{smallmatrix}b_1\\ b_2\end{smallmatrix} \right)$, that is, Img(T) = ℝ2
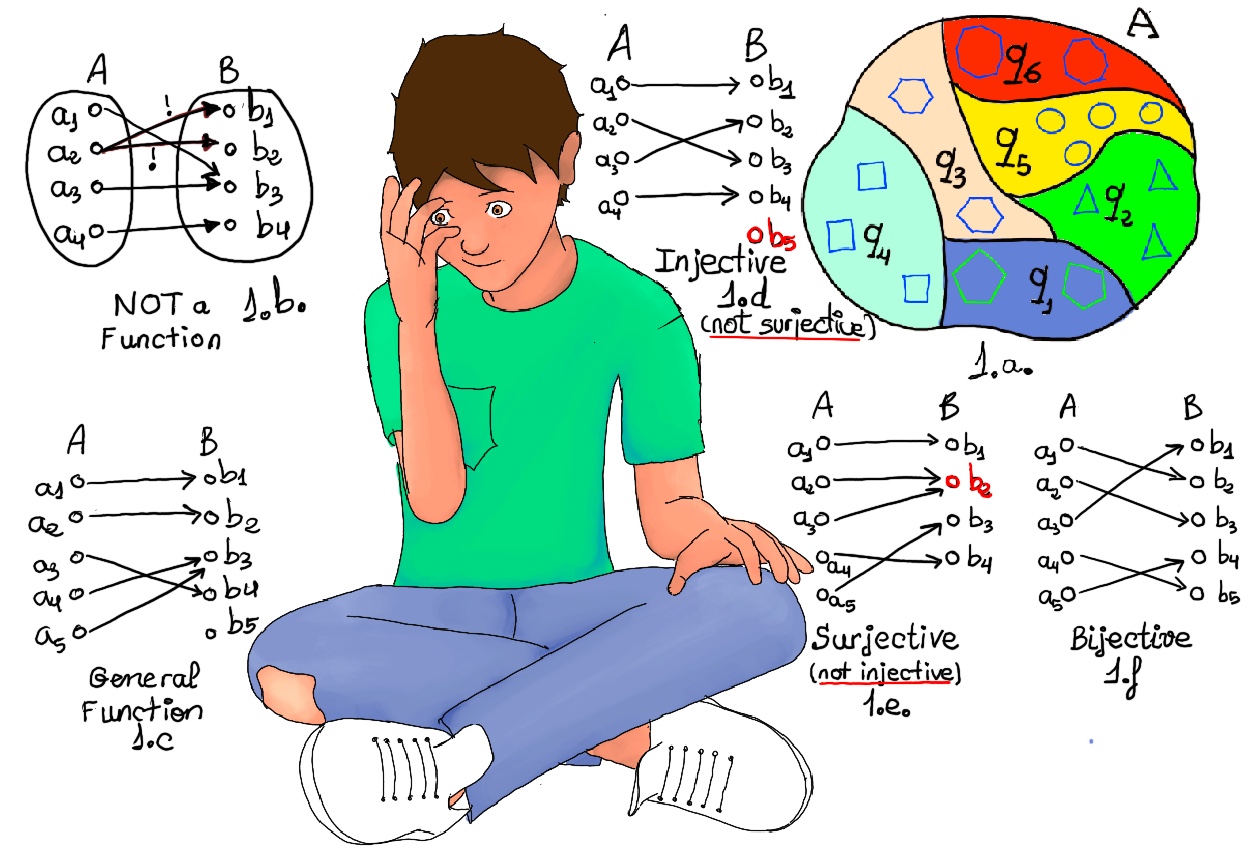
Definitions. A mapping T: X → Y is said to be…
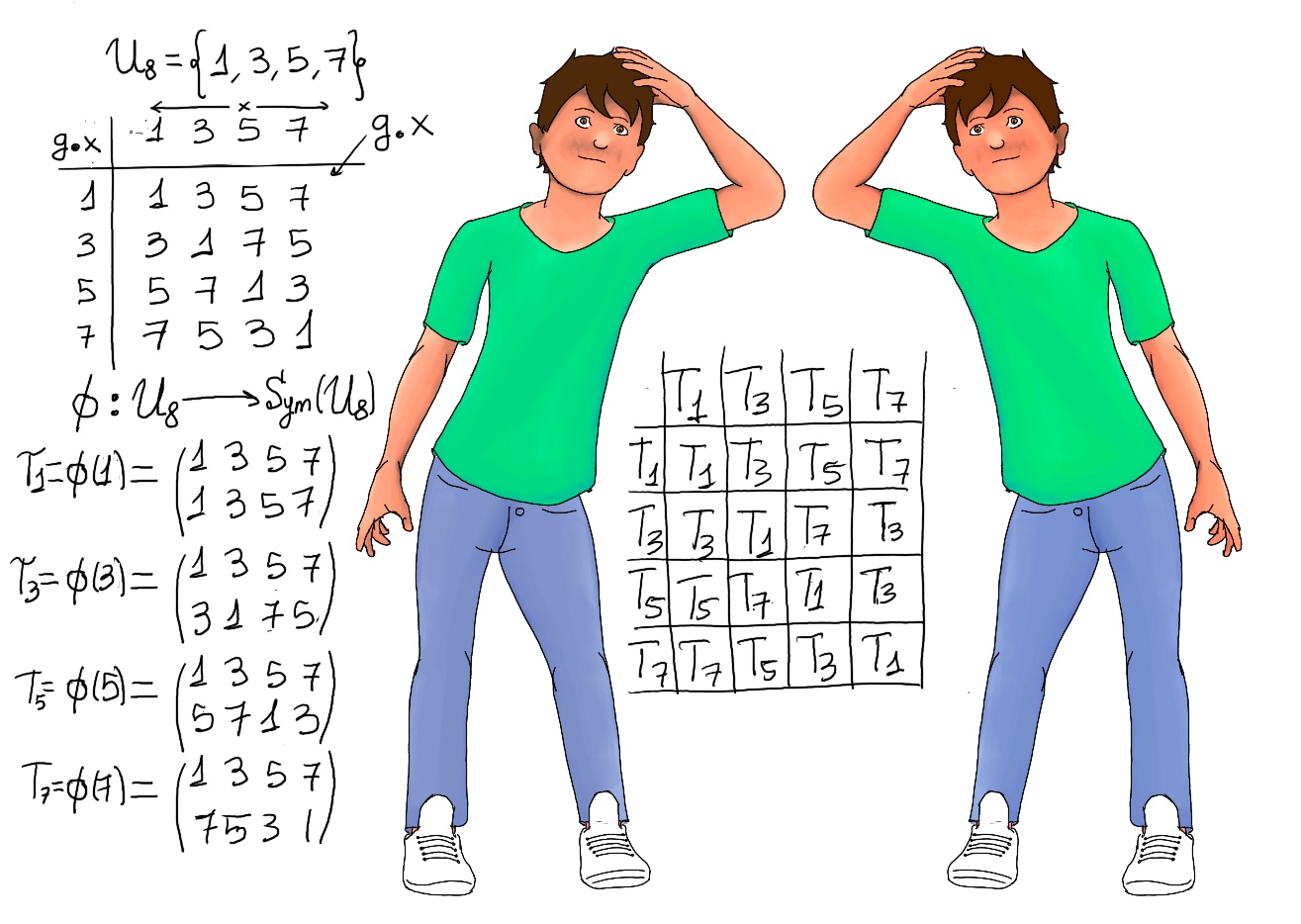
Example. T: ℤ23 → ℤ23, $T(x_1,x_2,x_3)=(x_1+x_2, x_2, x_1+x_2+x_3)$
$T(x)=0↭ \left( \begin{smallmatrix}x_1 + x_2\\ x_2\\ x_1+x_2+x_3\end{smallmatrix} \right) = \left( \begin{smallmatrix}0\\ 0\\ 0\end{smallmatrix} \right)$
$\begin{cases} x_1 + x_2 = 0 \\ x_2 = 0 \\ x_1 +x_2 +x_3 = 0 \end{cases}↭ Ker(T)=\left( \begin{smallmatrix}0\\ 0\\ 0\end{smallmatrix} \right)$ T is one to one.
$T(x)=b↭ \left( \begin{smallmatrix}x_1 + x_2\\ x_2\\ x_1+x_2+x_3\end{smallmatrix} \right) = \left( \begin{smallmatrix}b_1\\ b_2\\ b_3\end{smallmatrix} \right)$
$\begin{cases} x_1 + x_2 = b_1 \\ x_2 = b_2 \\ x_1 +x_2 +x_3 = b_3 \end{cases}$ ↭ $\begin{cases} x_1 = b_1 + b_2 \\ x_2 = b_2 \\ x_3 = b_1 + b_3 \end{cases}$
Therefore, T is onto and bijective.

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.