|
 |
 |
|
 |
|
|
|
|
|
|
The difference between a successful person and others is not a lack of strength, not a lack of knowledge, but rather is a lack or will. […] The price of success is hard work, dedication to the job at hand, and the determination that whether we win or lose, we have applied the best of ourselves to the task at hand, Vince Lombardi.
Definition. An isometry of a n-dimensional space Rn is a distance-preserving map Φ from ℝn onto itself, that is, ∀p, q ∈ ℝn, the distance from Φ(p) to Φ(q) is the same as the distance from p to q, i.e., d(p, q) = d(Φ(p), Φ(q)) where d is a metric on ℝn.
Let F be a set of points in ℝn. The symmetry group of F in ℝn is the set of all isometries of ℝn that carry F onto itself under function composition.
Examples:
Observe the multiplication table for the symmetry group (Figure 1.b.). The group is denoted as ⟨D2, ○⟩. It has order 4. D2 ≋ K4, the Klein four-group, the smallest non-cyclic group.
It can be shown that there are four types of Euclidean plane isometries:
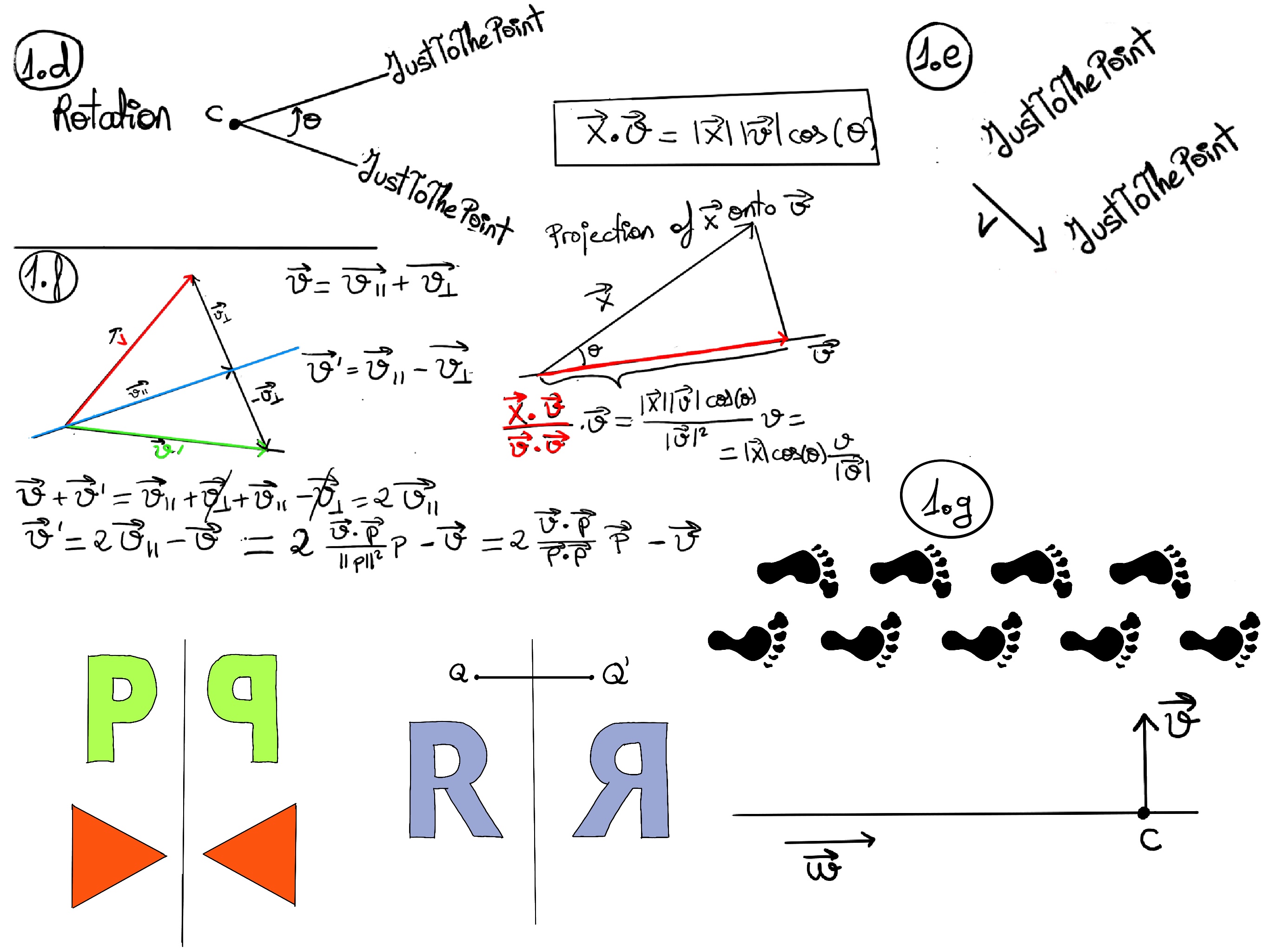
Let v’ be the reflection of a vector v through the blue line in the figure below (Figure 1.f.). We form two mirror-image right triangles.
If we add v and its reflection, v + v’ = (v∥ + v⊥) + (v∥ - v⊥) = 2v∥ ⇒ v’ = 2v∥ -v = $2\frac{v·p}{p·p}p-v$
Notice that the projection of a vector x onto v (In our particular case, v∥ onto p, where p is any non-zero vector parallel to the line of reflection) is defined as
$\frac{x.v}{v·v}v=\frac{|x||v|cos(θ)}{|v|^2}v=|x|cos(θ)\frac{v}{|v|}$ because this vector has length |x|cosθ -recall that v is a unit vector- and its points in the direction of v, which is what we were looking for.
Recall that x·v = |x||v|cos(θ)
A glide reflection is a composition of a reflection in the line described by c and v (Fc,v) and a translation along w.
Recall that the group of symmetries of a regular polygon with n sides contains the n rotations {rθ, θ = 2πk/n, k = 0,…, n-1} = ⟨r2π/n⟩ together with some mirror reflections. We center this regular n-sided polygon at (0, 0) with one vertex at (1, 0) and label its vertices by the nth roots of unity: 1, w, w2, …, wn-1, where w=ei2π/n (Figure 1.a.), all rotations can be written in the generic form of planar isometries as H(z)=αz, α = wk = ei2πk/n, k = 0,…, n-1
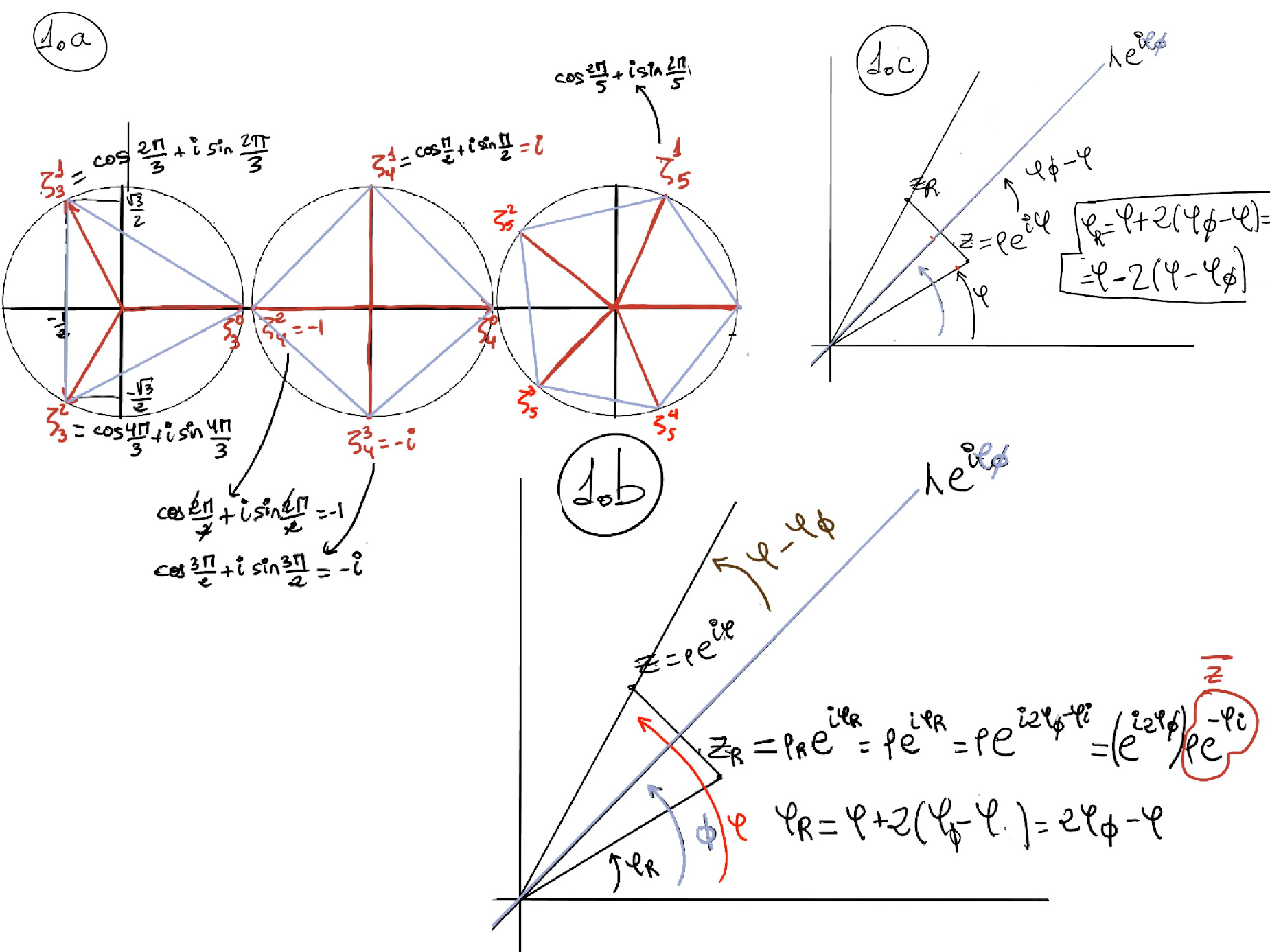
Let’s consider mirror reflections about a line l passing through (0, 0) at an angle Φ0, defined by l(λ) = λeiΦ0. We want to reflect a complex number, say z = ρeiΦ, about the line l. Let us write zR = ρReiΦR as the complex number z after being reflected. Since a reflection is an isometry and isometries are distance preserving maps, ρR = ρ.
Futhermore, suppose that ΦR ≤ Φ0 (Figure 1.b.) ⇒ ΦR = Φ +2(Φ0 -Φ). If ΦR ≥ Φ0 (Figure 1.c) ⇒ ΦR = Φ - 2(Φ - Φ0). And therefore, in both cases, ΦR = 2Φ0 -Φ, and zR = ρReiΦR = ρeiΦR = ρei2Φ0 -Φi = ρei2Φ0ρe-Φi = ρei2Φ0$\bar z$
Theorem. Any planar isometry is either a rotation, a translation, a reflection about a line in the plane, or a reflection about a line in the plane and a translation along the same line (glide reflection)
Every isometry in ℝ2 can be written as H:ℂ → ℂ, H(z) = αz + β or H(z) = α$\bar z + β$, |α| = 1.
$H(z)-\frac{β}{1-α}=αz + (β -\frac{β}{1-α})=αz+\frac{β-βα-β}{1-α}=α(z-\frac{β}{1-α})⇒H(z)=α(z-\frac{β}{1-α})+\frac{β}{1-α}$ Basically, we translate the fixed point to the origin, rotate, and translate back, that is, a rotation about the fixed point $\frac{β}{1-α}$
$(\begin{smallmatrix}x’\\ y’\end{smallmatrix})=(\begin{smallmatrix}cosθ & sinθ\\ sinθ & -cosθ\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})+(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix})$. A fixed point (xF, yF) satisfy the following equation,
$(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})=(\begin{smallmatrix}cosθ & sinθ\\ sinθ & -cosθ\end{smallmatrix})(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})+(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix}) ↭ (\begin{smallmatrix}1 & 0\\ 0 & 1\end{smallmatrix})(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})=(\begin{smallmatrix}cosθ & sinθ\\ sinθ & -cosθ\end{smallmatrix})(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})+(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix})$ ↭ $(\begin{smallmatrix}1-cosθ & -sinθ\\ -sinθ & 1+cosθ\end{smallmatrix})(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})=(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix})$
$det(M)=det(\begin{smallmatrix}1-cosθ & -sinθ\\ -sinθ & 1+cosθ\end{smallmatrix}) = (1-cos(θ))(1+cos(θ))-sin^2θ=1 -cos^2θ-sin^2θ=0$
This matrix M can be rewritten as, $(\begin{smallmatrix}2sin\frac{θ}{2}sin\frac{θ}{2} & -2sin\frac{θ}{2}cos\frac{θ}{2}\\ -2sin\frac{θ}{2}cos\frac{θ}{2} & 2cos\frac{θ}{2}cos\frac{θ}{2}\end{smallmatrix})=2(\begin{smallmatrix}sin\frac{θ}{2}\\ -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})$
sin(2θ) = 2sinθcosθ, sin(θ) = 2sin(θ/2)cos(θ/2)
Therefore, fixed points (xF, yF) have to be solutions of, $2(\begin{smallmatrix}sin\frac{θ}{2}\\ -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})=(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix})$
If $[t_1, t_2]=λ[sin(\frac{θ}{2}), -cos(\frac{θ}{2})]$
$2(\begin{smallmatrix}sin\frac{θ}{2}\\ -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})=λ(\begin{smallmatrix}sin(\frac{θ}{2})\\ -cos(\frac{θ}{2})\end{smallmatrix})↭2(\begin{smallmatrix}sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x_F\\ y_F\end{smallmatrix})=λ↭x_Fsin(\frac{θ}{2})-y_Fcos(\frac{θ}{2})=\frac{λ}{2}$, that is, (xF, yF) forms a line.
$(\begin{smallmatrix}x’\\ y’\end{smallmatrix})=(\begin{smallmatrix}cos^2\frac{θ}{2}-sin^2\frac{θ}{2} & 2sin\frac{θ}{2}cos\frac{θ}{2}\\ 2sin\frac{θ}{2}cos\frac{θ}{2} & -cos^2\frac{θ}{2}+sin^2\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})+λ(\begin{smallmatrix}sin\frac{θ}{2}\\ -cos\frac{θ}{2}\end{smallmatrix})=(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}1 & 0\\ 0 & -1\end{smallmatrix})(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})+λ(\begin{smallmatrix}sin\frac{θ}{2}\\ -cos\frac{θ}{2}\end{smallmatrix})$
Multiplying both side by the rotation $(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})$
$(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x’\\ y’\end{smallmatrix})=(\begin{smallmatrix}1 & 0\\ 0 & -1\end{smallmatrix})(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})+λ(\begin{smallmatrix}0\\ 1\end{smallmatrix})$
In the rotated coordinates $(\begin{smallmatrix}\bar x’\\ \bar y’\end{smallmatrix})=(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x’\\ y’\end{smallmatrix})$ and $(\begin{smallmatrix}\bar x\\ \bar y\end{smallmatrix})=(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})$, we have $(\begin{smallmatrix}\bar x’\\ \bar y’\end{smallmatrix})=(\begin{smallmatrix}1 & 0\\ 0 & -1\end{smallmatrix})(\begin{smallmatrix}\bar x\\ \bar y\end{smallmatrix})+λ(\begin{smallmatrix}0\\ 1\end{smallmatrix})$ ⇒ $\bar x’=\bar x,~ \bar y’= -\bar y+λ↭\bar x’=\bar x,~ (\bar y’-\frac{λ}{2})=-(\bar y-\frac{λ}{2})$. Therefore, in the rotated coordinates this isometry is a reflection about the line y =λ/2
If $[t_1, t_2]≠λ[sin(\frac{θ}{2}), -cos(\frac{θ}{2})]$, then we have no fixed points. Following the same argument,
$(\begin{smallmatrix}x’\\ y’\end{smallmatrix})=(\begin{smallmatrix}cos^2\frac{θ}{2}-sin^2\frac{θ}{2} & 2sin\frac{θ}{2}cos\frac{θ}{2}\\ 2sin\frac{θ}{2}cos\frac{θ}{2} & -cos^2\frac{θ}{2}+sin^2\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})+(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix})=(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}1 & 0\\ 0 & -1\end{smallmatrix})(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})+(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix})$
Multiplying both side by the rotation $(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})$
$(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x’\\ y’\end{smallmatrix})=(\begin{smallmatrix}1 & 0\\ 0 & -1\end{smallmatrix})(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}x\\ y\end{smallmatrix})+(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}t_1\\ t_2\end{smallmatrix})$
And we have as before in the rotated coordinates,
$(\begin{smallmatrix}\bar x’\\ \bar y’\end{smallmatrix})=(\begin{smallmatrix}1 & 0\\ 0 & -1\end{smallmatrix})(\begin{smallmatrix}\bar x\\ \bar y\end{smallmatrix})+(\begin{smallmatrix}cos\frac{θ}{2} & sin\frac{θ}{2}\\ sin\frac{θ}{2} & -cos\frac{θ}{2}\end{smallmatrix})(\begin{smallmatrix}t_1 \\ t_2\end{smallmatrix})=(\begin{smallmatrix}1 & 0\\ 0 & -1\end{smallmatrix})(\begin{smallmatrix}\bar x\\ \bar y\end{smallmatrix})+(\begin{smallmatrix}m \\ n\end{smallmatrix})$
$\bar x’=\bar x+m, (\bar y’-\frac{n}{2})=-(\bar y-\frac{n}{2})$. Therefore, $\bar x’=\bar x+m$ is a translation along the direction of the reflection line (consider that $\bar x’~ and~ \bar x$ are rotated coordinated, then it is a translation along the direction of the reflection line) and a reflection about the line y=n/2.
Theorem. Every finite group G of isometries of the plane is isomorphic to either ℤn or to a dihedral group Dn for some positive integer n.
Proof.
Let G be a finite group of isometries of the plane. G = {Φ1, Φ2,…, Φn}. This means that for every Φk, ⟨Φk⟩ is finite, that there exists Φk-1, and that Φk∘Φt = Φs ∈ G. What are all the isometries that could be in this finite group? Recall all the isometries of the plane: translations, rotations, reflections, and glide reflections.
Observe that ⟨Φk⟩ = {Φkn, n ∈ ℤ}, and therefore, a translation generates an infinite subgroup. Thus, translations cannot belong to a finite group.
Φk cannot be a glide reflection, since Φk∘Φk is a translation, then ⟨Φk2⟩ is not a finite set ⊥
Could it be a rotation? To define a rotation, we fix a center, say the origin, around which we rotate (counter-clockwise). R(θ): z → eθiz. In general, we take a rotation around a point different than 0, say z0, RΩ(θ) = [Ω = z0] Rz0(θ): z → eθi(z-z0) + z0.
First, translate z0 to the origin, then rotate, then move back to z0.
Therefore, a composition of rotations about a center Ω, RΩ(θ2) ∘ RΩ(θ1) = eiθ2(eiθ1(z - z0) + z0 -z0) + z0 = ei(θ1+θ2)(z - z0) + z0 = RΩ(θ1 + θ2) which shows that rotations about a given fixed center Ω (= z0) form a subgroup of planar isometries.
Let’s now consider the composition of two rotations about different centers.
RΩ1(θ1) = eiθ1(z -z1) + z1, RΩ2(θ2) = eiθ2(z -z2) + z2, so that
RΩ2(θ2) ∘ RΩ1(θ1) = eiθ2(eiθ1(z -z1) + z1 - z2) + z2 = ei(θ2+θ1)(z - z1) + eiθ2(z1 -z2) + z2 = ei(θ1+θ2)(z - γ) + γ
-ei(θ1+θ2)z1 + eiθ2(z1 -z2) + z2 = -ei(θ1+θ2)γ + γ
-ei(θ1+θ2)z1 + eiθ2z1 -eiθ2z2 + z2 = -ei(θ1+θ2)γ + γ
(1 - ei(θ1+θ2))γ = z2 + eiθ2(z1 - z2) -ei(θ1+θ2)z1
γ = z2 + eiθ2(z1 - z2) -ei(θ1+θ2)z1⁄1 - ei(θ1+θ2)
In conclusion, we have a rotation by (θ1 + θ2), that is, RΩ2(θ2) ∘ RΩ1(θ1) = ei(θ1+θ2)(z - γ) + γ, around a new center γ
If z1 ≠ z2 and θ2=-θ1, RΩ2(-θ1) ∘ RΩ1(θ1) =[In general] ei(θ2+θ1)(z - z1) + eiθ2(z1 -z2) + z2 =[θ2=-θ1] z - z1 -eiθ1(z1 -z2) + z2 = z + (z1 -z2)(e-iθ1 -1), that is, just a translation, so it is not possible.
Futhermore, if both $R_{Ω_1}(θ_1)$ and $R_{Ω_2}(θ_2)$ are in a finite group, then both their compositions and their inverses must be there, too.
$R_{Ω_2}(θ_2)∘R_{Ω_1}(θ_1)=$ ei(θ2+θ1)(z - z1) + eiθ2(z1 -z2) + z2 = ei(θ2+θ1)z -ei(θ2+θ1)z1 + eiθ2(z1 -z2) + z2
$R_{Ω_2}^{-1}(θ_2)∘R_{Ω_1}^{-1}(θ_1)=$ e-i(θ2+θ1)(z - z1) + e-iθ2(z1 -z2) + z2 = e-i(θ2+θ1)z -e-i(θ2+θ1)z1 + e-iθ2(z1 -z2) + z2
$R_{Ω_2}(-θ_2)∘R_{Ω_1}(-θ_1)∘R_{Ω_2}(θ_2)∘R_{Ω_1}(θ_1)=$ e-i(θ2+θ1)[ei(θ2+θ1)z -ei(θ2+θ1)z1 + eiθ2(z1 -z2) + z2] -e-i(θ2+θ1)z1 + e-iθ2(z1 -z2) + z2 = z -z1 + e-iθ1(z1-z2) +e-i(θ2+θ1)z2 -e-i(θ2+θ1)z1 + e-iθ2(z1 -z2) + z2 = z + (z2-z1) + e-i(θ2+θ1)(z2-z1) -(z2-z1)(e-iθ1 + e-iθ2) = z + (z2-z1)[1 + e-i(θ2+θ1) -(e-iθ2 + e-iθ1)], a pure translation if z1≠z2, that is, rotations about different centers cannot be included.
Among the planar isometries, so far, only rotations with same center are allow.
So we are left with reflections and glide reflections about a line l. Suppose we have two reflections or two glide reflections (composition with a translation, say β1 and β2) of the form,
Φ1: z → $e^{iθ_1}\bar z+β_1$, Φ2: z → $e^{iθ_2}\bar z+β_2$
Φ2∘Φ1(z)=$e^{iθ_2}\overline {(e^{iθ_1}\bar z + β_1)}+β_2=e^{i(θ_2-θ_1)}z+\bar β_1e^{iθ_2}+β_2$
If θ2 = θ1 = θ, Φ2∘Φ1(z) = z +$\bar β_1e^{iθ}+β_2$, we get a translation, where $\bar β_1e^{iθ}+β_2$ is the translation vector. This is happening when the lines defining the reflections and glide reflections are parallel. They reflect a shape with respect to a line, and then again with respect to another line parallel to the first one, and basically you will get the shape being translated in the direction perpendicular to both lines.
If instead θ2-θ1≠0, we get a rotation, since the composition Φ2∘Φ1(z) will have one well defined fixed point,
zFP =$ e^{i(θ_2-θ_1)}z_{FP}+\bar β_1e^{iθ_2}+β_2$ ⇒ $z_{FP} = \frac{\bar β_1e^{iθ_2}+β_2}{1-e^{i(θ_2-θ_1)}}$
Therefore, we can have:
Let us look at the rotations about Ω in G and list the rotation angles in increasing order: θ1 < θ2 < ··· < θl-1. Therefore, r(θ1) is the smallest rotation, and by composition closure r(2θ1), r(3θ1), …, r(kθ1) ∀k ∈ ℤ must be in G, too. We claim that these must be all the rotations in G.
Let’s assume for the sake of contradiction, there exists θt which is not kθ1 mod 2π. Then, θt = sθ1 + ζ where 0 < ζ < θ1, and r(ζ) = r(θt - sθ1) = r(θt)r(-sθ1) = r(θt)r(θ1)-s ⇒ r(ζ) = r(θt)r(θ1)-s, but r(θt)r(θ1)-s obviously belongs to the group of rotations ⇒ it is a rotation of an angle that belongs to {θ1, θ2,…, θl-1} with ζ < θ1 ⊥ (by assumption, θ1 is the minimal angle, θ1 < θ2 < ··· < θl-1).
Besides θ1 = 2π/l. Otherwise, lθ1 = 2π + η with η < θ1 and rl(θ1) = r(2π)r(η) = r(η) with η < θ1 ⊥ (θ1 is the minimal angle). And therefore, we have exactly l rotations generated by r(θ1), θ1 = 2π/l, and ⟨r(θ1)⟩ is the cyclic group of order l.
If ⟨r(θ1)⟩ = G, we are done. If this is not the case, then there are reflections in G, too.
Let m be a reflection that belongs to G. If m and ⟨r(θ1)⟩ are both in G, then by closure, m, mr, mr2,…, mrl-1 ∈ G and all of these are distinct reflections.
Futhermore, can another reflection, say m’, be in the group?
If m’≠mrα, then [Recall that composition of two reflections is a rotation] mm’ is a rotation in G, and since we have already shown that all rotations are in ⟨r(θ1)⟩, mm’ = rα ⇒ m’ = m-1rα = mrα⊥. Futhermore, (mrα)(mrα) = [This is true for any reflection, m2=1] 1 ⇒ mrαm = r-α.
Therefore, we have proved that G = {1, r, r2, …, rl-1, m, mr, …, mrl-1}, where m2 = 1, rl=1, mrαm = r-α. This is just the dihedral group Dp = {⟨r, m⟩| m2=1, rl = 1, mr = r-1m}. So we have already proved that a finite group of planar symmetries is either cyclic of some order n and isomorphic to ℤn or dihedral Dn.
Theorem. The finite groups of rotations in ℝ3 are ℤn, Dn, A4, S4, and A5 up to isomorphism.
Exercise. Let’s determine the group G of rotations of the solid in the figure below, a Cuboctahedron. This is composed of six congruent squares and eight congruent equilateral triangles.
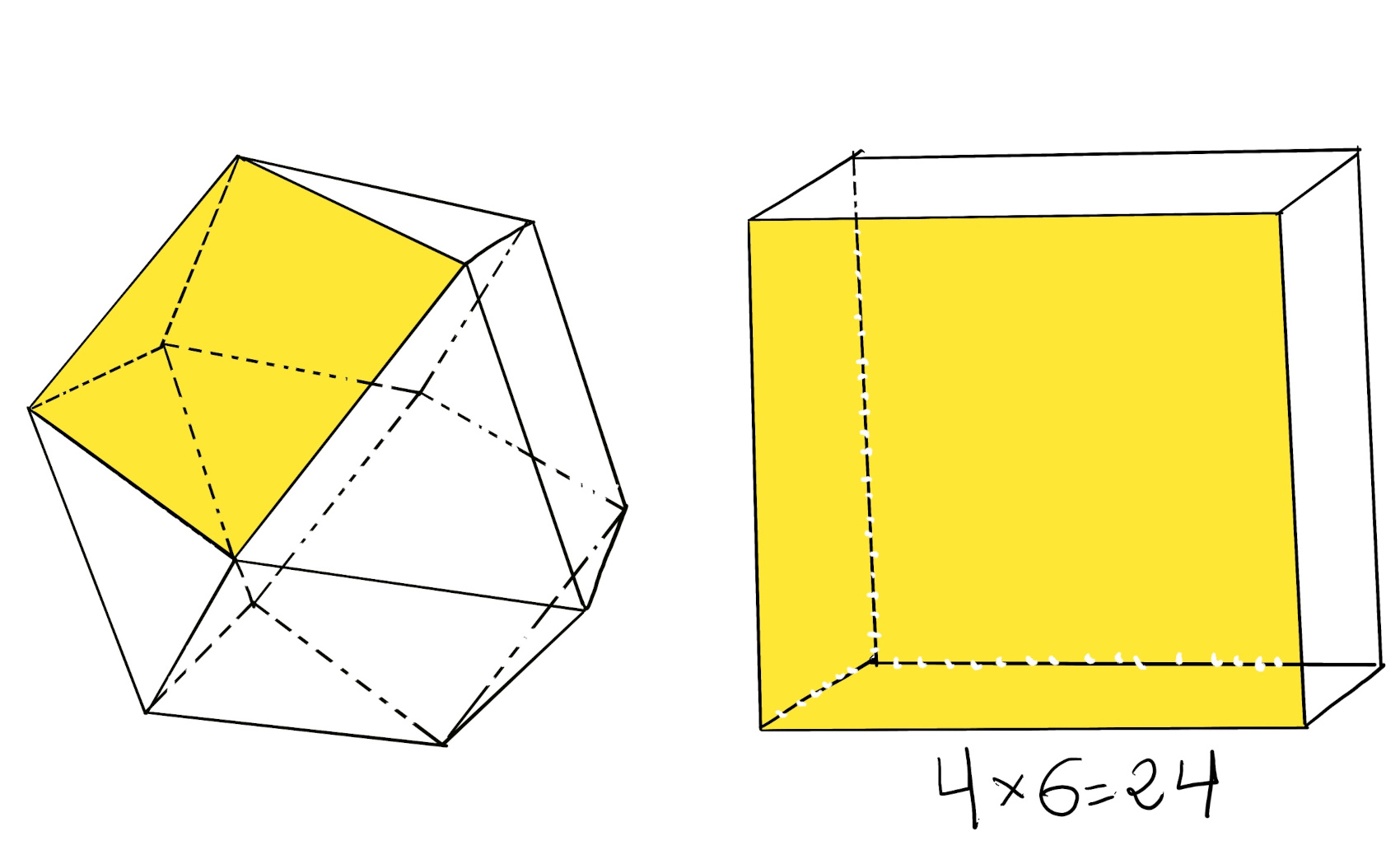
Let’s take one of the squares. There are four rotations that map this square to itself, and this square can be rotated to the location of any of the other five. So by the Orbit-Stabilizer theorem, the rotation group |G| has order |Orb(x)||Stab(x)| = 6·4 = 24 ⇒[The finite groups of rotations in ℝ3 are ℤn, Dn, A4, S4, and A5 up to isomorphism.] G ≋ Z24, D12, or S4, but Z24, D12 has only two elements of order 4, therefore G ≋ S4.
Every element of the group G of rotations of the solid permutes the faces of the solid among themselves. Let G be a group action on a set X so that G x X → X. Orb(x) = {y ∈ X: ∃g ∈G: y = g * x} = is the set of faces where the chosen face can go = 6. Stab(x) = {g ∈ G: g*x = x} is the set of symmetries fixing a particular face = 4.

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.