|
 |
 |
|
 |
|
|
|
|
|
|
There are 11₂ kinds of people: those who understand binary, and those who don’t.
Without pain, without sacrifice, we would have nothing, Fight Club.
Definition. A binary operation on a set G is a rule, method, or correspondence that assigns to each ordered pair of elements of the set G a uniquely determined element of the set. Therefore, it is a function from the set G x G of ordered pairs (a, b) to G. The value is frequently denoted as a * b, a ∘ b, or simply ab.
Examples:
Division is not a binary operation on the set of integers because the result is not always an integer (e.g. 2/3 ∉ ℤ). It is not either a binary operation on the set of real numbers because we cannot divide by zero (1/0 ∉ ℝ).
A binary operation is simply a rule, formula or method of combining the elements of a set, two at a time, in such a way that their combination is also a member of the set. This condition is called closure.
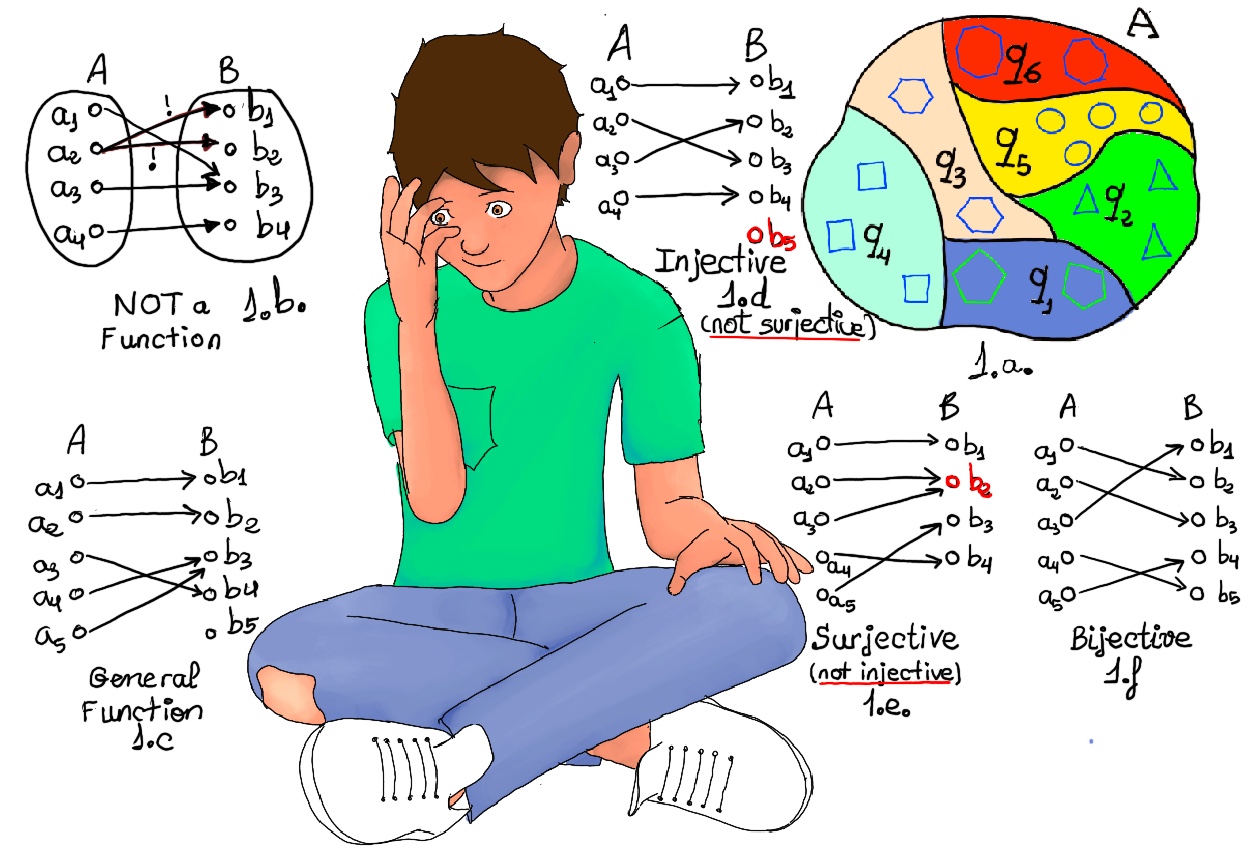
For a binary set, a binary operation can be defined or described by a table using the following rule, (ith entry on the left)*(jth entry on the top) = (entry in the ith row and jth column of the table), see Figure 1.c. (e.g., b*c = d, c*d = b). 
Let∗be a binary operation on S, H a subset of S (H ⊂ S). The subset H is closed under∗if the restriction of * to H forms a binary operation on H, that is, ∀a, b ∈ H, we also have a∗b ∈ H.
Examples:
A group is an abstraction of the operations of addition and multiplication in arithmetic.💡We want to be able to solve equations such as x + 2 = 5:
Definition. A group is a nonempty set G together with a binary operation on G, denoted as ◦, ·, *, or simply omitted, satisfying the following axioms:
The definition of a group does not require that ab = ba for every pair of elements a and b. If this additional condition holds, then the binary operation is said to be commutative, and the group is called an Abelian group.
The identity is [0], the congruence class of all multiples of n. For a congruence class [k], the inverse is the class [-k]. The associative and commutative properties are inherited from ℤ.
Example: Figure 1.a. U10 = {[1], [3], [7], [9]}. The reader should notice that gcd(1, 10) = gcd(3, 10) = gcd(7, 10) = gcd(9, 10) = 1. [3]·[7] = [7]·[3] = [1], so [3] = [7]-1 and [7] = [3]-1.
The Euclidean algorithm is used to calculate inverses in U(n) because it computes a linear combination ak + bn = 1 ⇒ ak ≡ 1 (mod n), and therefore a = k-1.
The dihedral group Dn is the group of symmetries of a regular polygon with n vertices, which includes rotations and reflections or, alternatively, the rigid motions taking a regular n-gon back to itself. Dn = {e, r, r2,…, rn-1, s, rs, r2s,…, rn-1s} = ⟨r, s | rn = s2 = e, rs = srn-1⟩. In particular, the dihedral group D3 is the symmetry group of the equilateral triangle and D4 is the symmetry group of the square. 
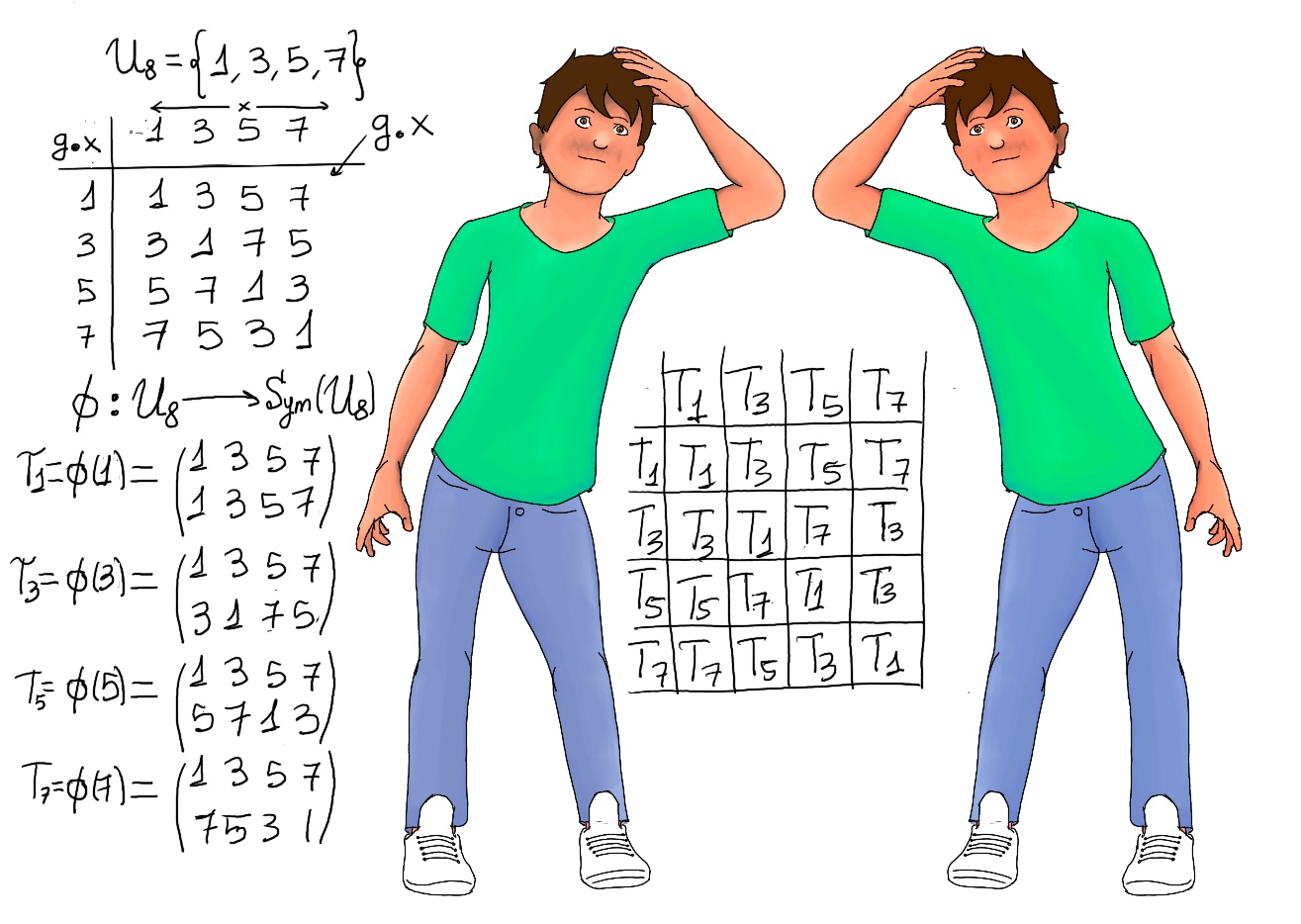
Let X be a set, the symmetric group defined over X is the group whose elements are all the bijections from the set X to itself and whose group operation is the composition of functions. SX = {f: X → X, f is a bijection}
If X is finite, X = {1, 2, 3,…, n}, instead of SX, the symmetric group of X is denoted as Sn, the symmetric group of degree n. If X is a finite, non-empty set, |SX| = [By convention] |Sn| = n!
Typically, we use Cauchy’s two-line notation to describe it. One lists all the elements of S in the first row and for each element, its image just below it in the second row. Let f ∈ Sn, $f = (\begin{smallmatrix}1 & 2 & ··· & n\\ f(1) & f(2) & ··· & f(n)\end{smallmatrix})$
Example: f, g ∈ S6, $f = (\begin{smallmatrix}1 & 2 & 3 & 4 & 5 & 6 \\ 2 & 1 & 4 & 3 & 6 & 5\end{smallmatrix}), g = (\begin{smallmatrix}1 & 2 & 3 & 4 & 5 & 6 \\ 5 & 4 & 3 & 2 & 1 & 6\end{smallmatrix})$
$f · g = (\begin{smallmatrix}1 & 2 & 3 & 4 & 5 & 6 \\ 3 & 6 & 1 & 4 & 2 & 5\end{smallmatrix}) · (\begin{smallmatrix}1 & 2 & 3 & 4 & 5 & 6 \\ 5 & 4 & 3 & 2 & 1 & 6\end{smallmatrix}) = (\begin{smallmatrix}1 & 2 & 3 & 4 & 5 & 6 \\ 2 & 4 & 1 & 6 & 3 & 5\end{smallmatrix})$
Let V be a vector space over a field F. An automorphism is a bijective homomorphism that maps V to itself. The set of all automorphisms of V is denoted by Aut(V). Aut(V) = {φ:V→V: φ is lineal and bijective} is a group where the group operation is the composition. φ is a mapping that preserves the operations of vector addiction and scalar multiplication, that is, (λφ)(αv + βw) = α(λφ)v + β(λφ)w and (φ + φ’)(αv + βw) = α(φ + φ’)v +β(φ + φ’)w.
$GL(2, ℝ) = \bigl\{ {{[\bigl(\begin{smallmatrix}a & b\\ c & d\end{smallmatrix}\bigr)]: a, b, c, d ∈ ℝ, ad - bc ≠ 0}} \bigr\}$ is the group of invertible 2 x 2 matrices with entries in ℝ and non-zero determinant.
The operation is defined as $[\bigl(\begin{smallmatrix}a_1 & b_1\\ c_1 & d_1\end{smallmatrix}\bigr)]·[\bigl(\begin{smallmatrix}a_2 & b_2\\ c_2 & d_2\end{smallmatrix}\bigr)]=[\bigl(\begin{smallmatrix}a_1a_2+b_1c_2 & a_1b_2+b1d_2\\ c_1a_2+d_1c_2 & c_1b_2+d_1d_2\end{smallmatrix}\bigr)]$
∀A, B ∈ GL(2, ℝ), det(A·B) = det(A) * det(B) ≠ 0, so A·B∈ GL(2, ℝ), and therefore, it is closed under matrix multiplication. The identity is $[\bigl(\begin{smallmatrix}1 & 0\\ 0 & 1\end{smallmatrix}\bigr)]$; the inverse of $[\bigl(\begin{smallmatrix}a & b\\ c & d\end{smallmatrix}\bigr)]$ is $[\bigl(\begin{smallmatrix}\frac{d}{ad-bc} & \frac{-b}{ad-bc}\\ \frac{-c}{ad-bc} & \frac{a}{ad-bc}\end{smallmatrix}\bigr)]$. Therefore, GL(2, ℝ) is a group under matrix multiplication. However, it is non-commutative.
More generally, let F be a field, ∀n ∈ ℤ+, let GLn(F) = GL(n, F) = {A | A is an n x n matrix with entries from F and det(A) ≠ 0}. For any arbitrary n x n matrices A, B, let A·B be the product of matrices as computes by the same rules as when F = ℝ. GLn(F) is a group under matrix multiplication. It is called the general linear group of degree n, the set of nxn invertible matrices together with the operation of ordinary matrix multiplication.
As you probably should know, real numbers can be represented as points on a one-dimensional number line. Complex numbers, with their real and imaginary components, require a two dimensional complex-number plane. This complex number plane can also be represented with polar coordinates, so z = x + iy = r(cosθ + isenθ). r = |z| = $\sqrt{x^{2}+y^{2}}$, x = r cosθ, and y = rsinθ.

JustToThePoint Copyright © 2011 - 2024 Anawim. ALL RIGHTS RESERVED. Bilingual e-books, articles, and videos to help your child and your entire family succeed, develop a healthy lifestyle, and have a lot of fun. Social Issues, Join us.
This website uses cookies to improve your navigation experience.
By continuing, you are consenting to our use of cookies, in accordance with our Cookies Policy and Website Terms and Conditions of use.